支持以太网、Wi-Fi 6、蓝牙5.2、USB连接,
配备阵列麦克风与扬声器,支持语音交互。 全身控制系统
搭载 Jetson Thor 机载算力和全链路开发工作流的人形机器人平台。
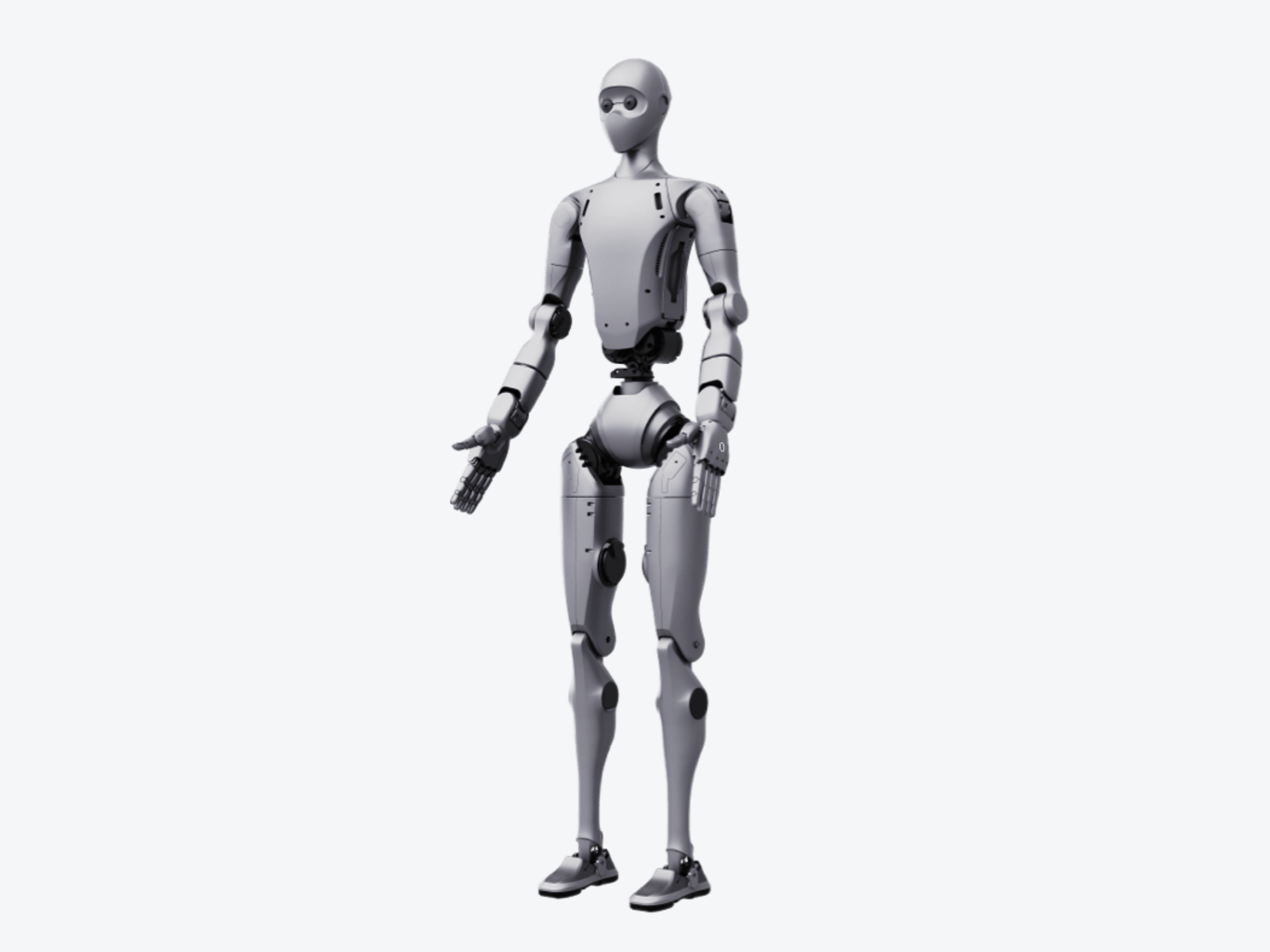
Unitree H2 Plus 是 人形机器人产品,核心信息包括最高 2070 FP4 TOPS、全身加手部合计 75 自由度、手臂额定负载 7kg。
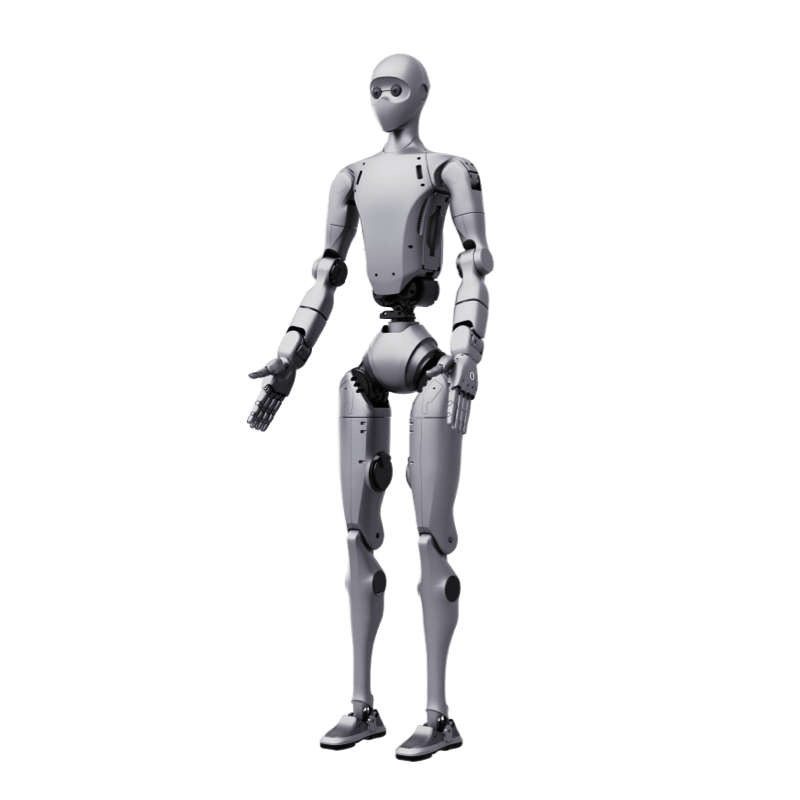
Unitree H2 Plus 的资料页已整理为产品定位、关键能力、参数、版本、影像资料、资料链接和关联内容。
T5000 机载算力: 算力达 2070 FP4 万亿次浮点运算
手臂最大扭矩: 120N/m
腿部最大扭矩: 360N/m
长续航电池: 15Ah、0.972kWh容量
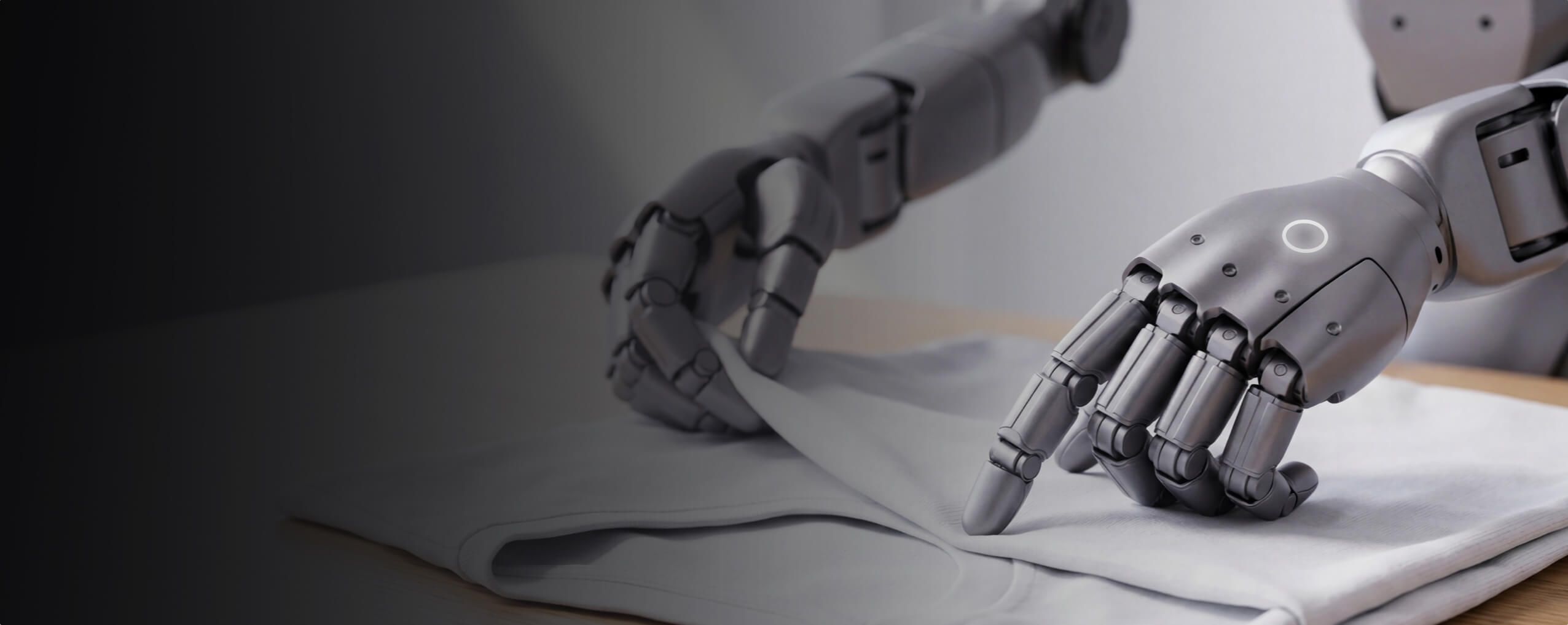
超大负载: 手臂额定负载 7kg、
手臂额定负载 7kg、: 峰值负载 15kg,
峰值负载 15kg,: 支持高强度抓取与伸展作业。
手部22个自由度,: 全身+手部合计75个自由度,
支持以太网、Wi-Fi 6、蓝牙5.2、USB连接,:配备阵列麦克风与扬声器,支持语音交互。 全身控制系统
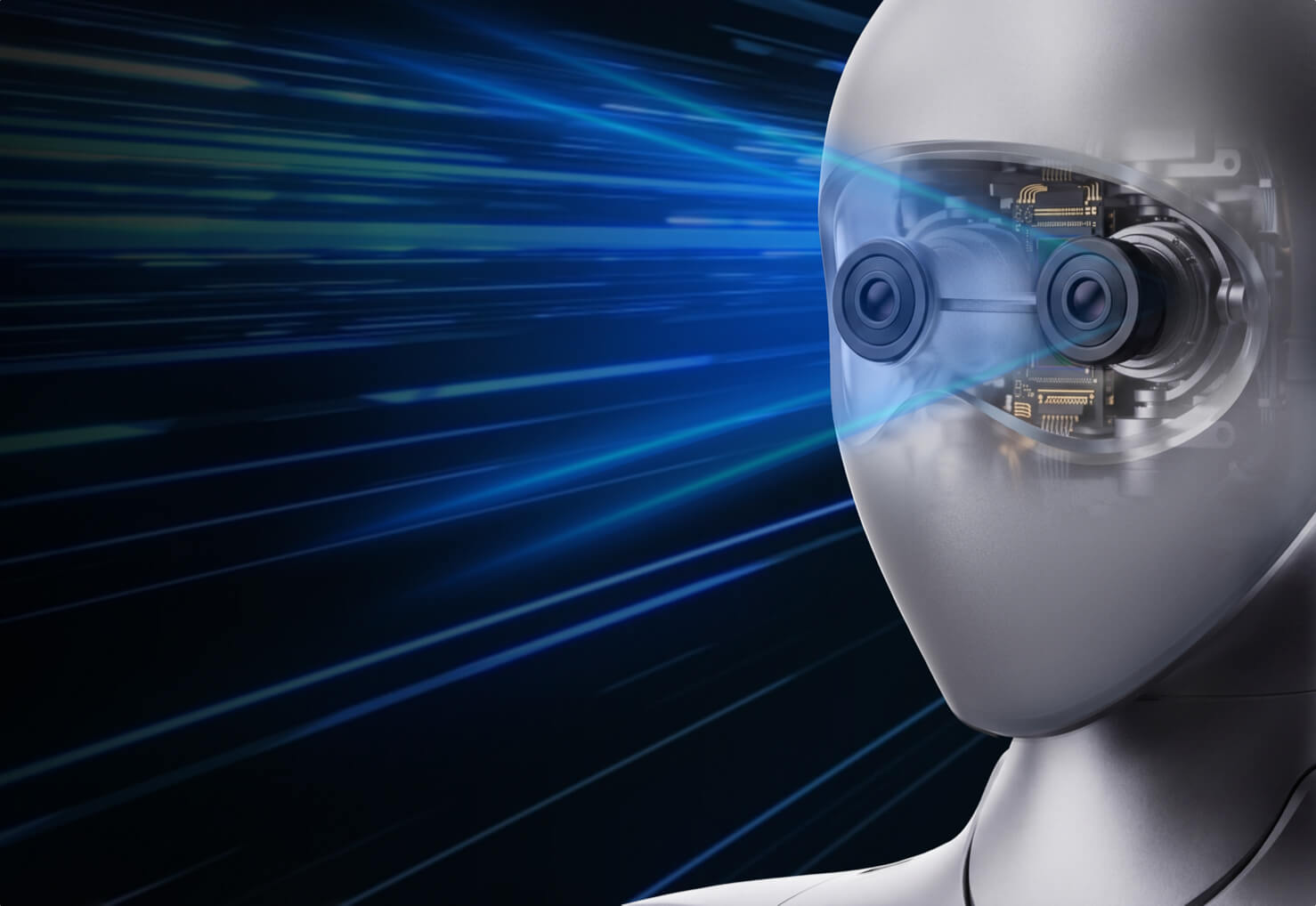
15Ah、0.972kWh容量:续航约3小时。 多视角感知系统
实现高精度灵巧操作:搭载 NVIDIA Isaac™ GR00T模型 配备开源模型、仿真框架以及经过验证的、覆盖从数据到部署的参考工作流。
PC1:Intel Core i5(平台功能):PC2:Intel Core i7(用户开发) 感知传感器
智能OTA升级:二次开发 [2] 保修期 [3]
T5000 机载算力: 算力达 2070 FP4 万亿次浮点运算
手臂最大扭矩: 120N/m
腿部最大扭矩: 360N/m
长续航电池: 15Ah、0.972kWh容量
超大负载: 手臂额定负载 7kg、
手臂额定负载 7kg、: 峰值负载 15kg,
峰值负载 15kg,: 支持高强度抓取与伸展作业。
手部22个自由度,: 全身+手部合计75个自由度,
实现高精度灵巧操作: 搭载 NVIDIA Isaac™ GR00T模型
带电池重量: 约 70kg
自由度(关节电机数): 31
手臂最大关节峰值扭矩 [1]: 120N.m
配备阵列麦克风与扬声器,支持语音交互。 全身控制系统
续航约3小时。 多视角感知系统
搭载 NVIDIA Isaac™ GR00T模型 配备开源模型、仿真框架以及经过验证的、覆盖从数据到部署的参考工作流。
PC2:Intel Core i7(用户开发) 感知传感器
二次开发 [2] 保修期 [3]
配备开源模型、仿真框架以及经过验证的、覆盖从数据到部署的参考工作流。 超强机载算力NVIDIA ® Jetson Thor™
搭载Blackwell GPU,算力达 2070 FP4 万亿次浮点运算;14核 Arm CPU、128GB 统一内存、40W-130W 可调功耗,满足实时传感器处理与机器人推理需求。 NVIDIA Isaac 遥操作系统
NVIDIA Jetson™ T5000 机载算力
配备阵列麦克风与扬声器,支持语音交互。 全身控制系统
Unitree H2 Plus 是 人形机器人产品,核心信息包括最高 2070 FP4 TOPS、全身加手部合计 75 自由度、手臂额定负载 7kg。
| 二次开发 | 有/可咨询 | 开源模型、仿真框架和参考工作流 |
|---|
| 续航时间 | 约 3h |
|---|
| 最高算力 | 2070 TOPS |
|---|
| 负载 | 峰值约 15kg | |
|---|---|---|
| 最大关节扭矩 | 约 360N.m |
| 自由度 | 31-75 |
|---|
| 重量 | 约 70kg | |
|---|---|---|
| 宽度 | 456mm | |
| 高度 | 1820mm | 站立或组件尺寸 |
H2 Plus 是 Unitree H2 Plus 的产研版。
实现高精度灵巧操作
配备开源模型、仿真框架以及经过验证的、覆盖从数据到部署的参考工作流。
NVIDIA Isaac 遥操作系统
以供训练与策略开发,
对机器人策略进行仿真、训练、测试与评估,
将训练好的策略迁移至机器人本体。
高承载力)
在不同业务场景、不同设备姿态等情况下有所差异,请以实际为准







宇树科技作为人形机器人公司厂家, 正式发布首款通用人形机器人H1, H1是国内第一台能跑的全尺寸通用人形机器人, 这款机器人不仅标志着国内人形智能机器人技术迈出了坚实的一步, 更是双足机器人技术应用的重大突破。


宇树科技人形机器人G1拥有超越常人的灵活性, 可以模仿&强化学习驱动, 结合力位混合控制, 灵敏可靠, 可以模拟人手实现对物体的精准操作, 了解人形机器人的价格、功能和作用。

Booster K1 是加速进化官网定位的具身开发入门级平台。官网公开资料显示,K1 起售价 3.99 万元,约 95cm、约 19.5kg、22 自由度,极客版、教育版、专业版分别提供 48、117、200 TOPS AI 算力,并面向 RoboCup KidSize、教育课程和具身开发入门场景。

Booster T1 是加速进化官网面向开发者、科研团队和 RoboCup 场景展示的人形机器人开发平台。官网资料显示,T1 约 1.18m、约 30kg,支持基础版、标准版、定制版三档配置,最高可到 41 自由度,搭载 NVIDIA AGX Orin 提供 200 TOPS AI 算力,持续行走约 2 小时、持续站立约 4 小时。
可以按产品线、形态、尺寸级别、重量、自由度、续航、价格和关联硬件查看。
最高 2070 FP4 TOPS;全身加手部合计 75 自由度;手臂额定负载 7kg