快速推理,自主决策
官网文案称 G1 拥有具备空间智能的“大脑”大模型,可理解三维场景、自然语言交互并分解长程任务。
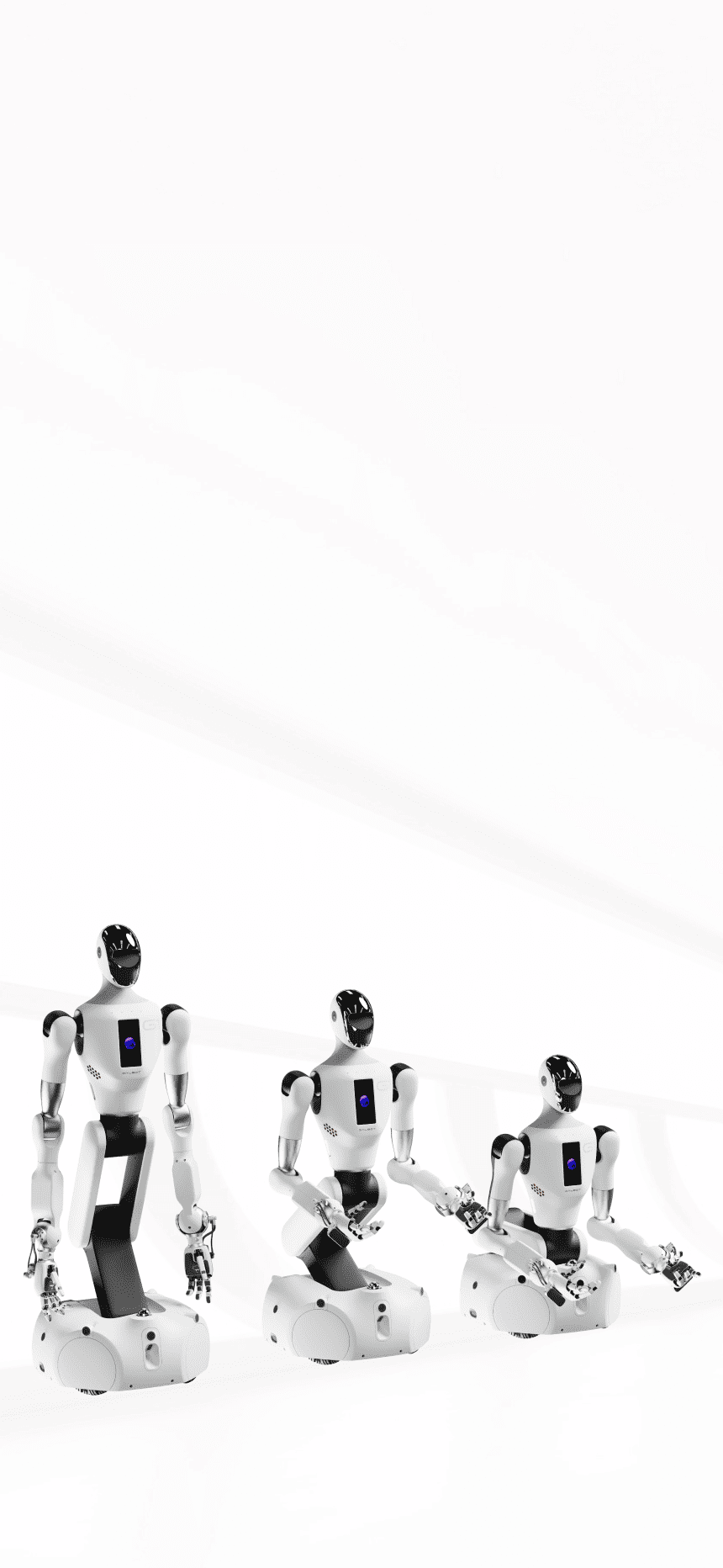
可泛化操作的具身大模型机器人,采用轮式与折叠升降设计,覆盖 0-2.4m 工作空间。

Galbot G1 是银河通用官网重点展示的轮式双臂通用机器人。公开页面称其面向可泛化操作,具备轮式移动、折叠升降、双臂操作、空间智能大模型和多场景服务能力;参数表显示标准姿态高度 1730mm、机身重量 92.5kg、AGX Orin 64GB 275TOPS、双臂末端负载单臂 5kg/合计 10kg。页面中续航同时出现 8h 与 10h 两种口径,本站保留为 8-10h 待后续核验。
Galbot G1 的公开资料核心不是单纯展示人形外观,而是围绕轮式移动、双臂操作、具身大模型和真实作业场景展开。
G1 页面详细参数表给出标准姿态高度、躯壳升降高度、底盘尺寸、手臂长度、工作空间、重量、感知、系统、执行和电气参数;这些参数已拆入参数库,避免只留在富文本里。
同一页面不同模块对续航和重量存在差异:概要区出现体重 85kg、续航 10h,详细参数区出现机身重量 92.5kg、满电运行 8h。本站按来源保留差异并标记为需要后续核验的事实。
0-2.4m 超大工作空间
IP54 级防护
EmbOSAr 自研系统架构
AGX Orin 64GB 275TOPS
双臂末端负载单臂 5kg / 合计 10kg
支持 Isaac Sim / MuJoCo 等仿真平台
官网文案称 G1 拥有具备空间智能的“大脑”大模型,可理解三维场景、自然语言交互并分解长程任务。

G1 被描述为具备多任务、多技能能力的“小脑”大模型,通过数十亿级仿真合成数据训练,展示多种泛化具身技能。

G1 采用轮式与折叠相结合的移动升降设计,横向平稳灵活移动,纵向覆盖地面到高位货架的操作空间。
| 自由度 | 腿部2 + 腰部2 + 颈部2 + 双臂7x2 + 底盘驱动轮4,合计24(不含末端执行器) | 详细参数表 |
|---|
| 负载 | 单臂 5kg,合计 10kg | 详细参数表 |
|---|
| 交互屏 | 5.5寸触摸屏,分辨率 1920 x 1080;页面能力模块另称 6.25 英寸智能交互屏 | 不同模块口径并存 |
|---|
| 最高算力 | AGX Orin 64GB 275TOPS | 详细参数表 |
|---|
| 传感器 | 头部双目相机 x1;腕部深度相机 x2、六维力传感器 x2;躯干 RGB 相机 x4、IMU x2;底盘 3D 激光雷达 x1、超声波传感器 x8、IMU x1 | 详细参数表 |
|---|
| 充电时长 | 54.6V 10A | 详细参数表 |
|---|
| 续航时间 | 8h(详细参数表);概要模块另有 10h 口径 | 不同模块口径并存 |
|---|---|---|
| 电池容量 | 48V 30Ah | 详细参数表 |
| 重量 | 92.5kg(详细参数表);概要模块另有 85kg 口径 | 不同模块口径并存 |
|---|---|---|
| 底盘尺寸 | 600 x 600mm | 详细参数表 |
| 高度 | 1730mm | 详细参数表 |
| 水平工作范围 | 1900mm | 以手腕中心计 |
|---|---|---|
| 垂直工作范围 | 0-2100mm(详细参数表);首页模块称 0-2.4m 超大工作空间 | 不同模块口径并存 |
| 单臂臂展 | 710mm(肩部到腕部) | 详细参数表 |
| 身体/升降行程 | 650mm | 详细参数表 |
按 Galbot G1 官网本地镜像公开参数建立的标准记录。
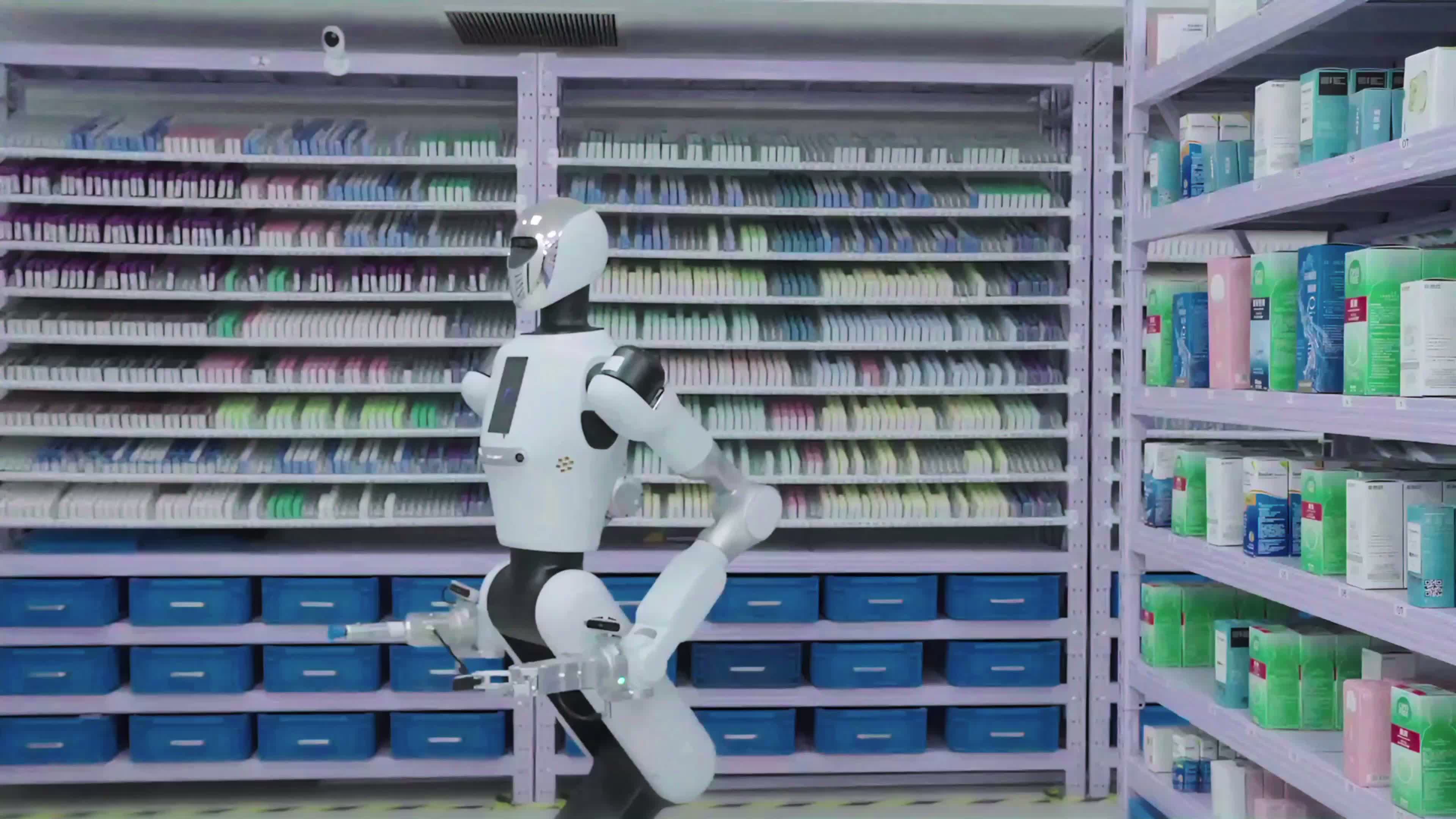
在零售商超场景中执行取货、交付、盘点、补货和 24 小时无人值守等任务。
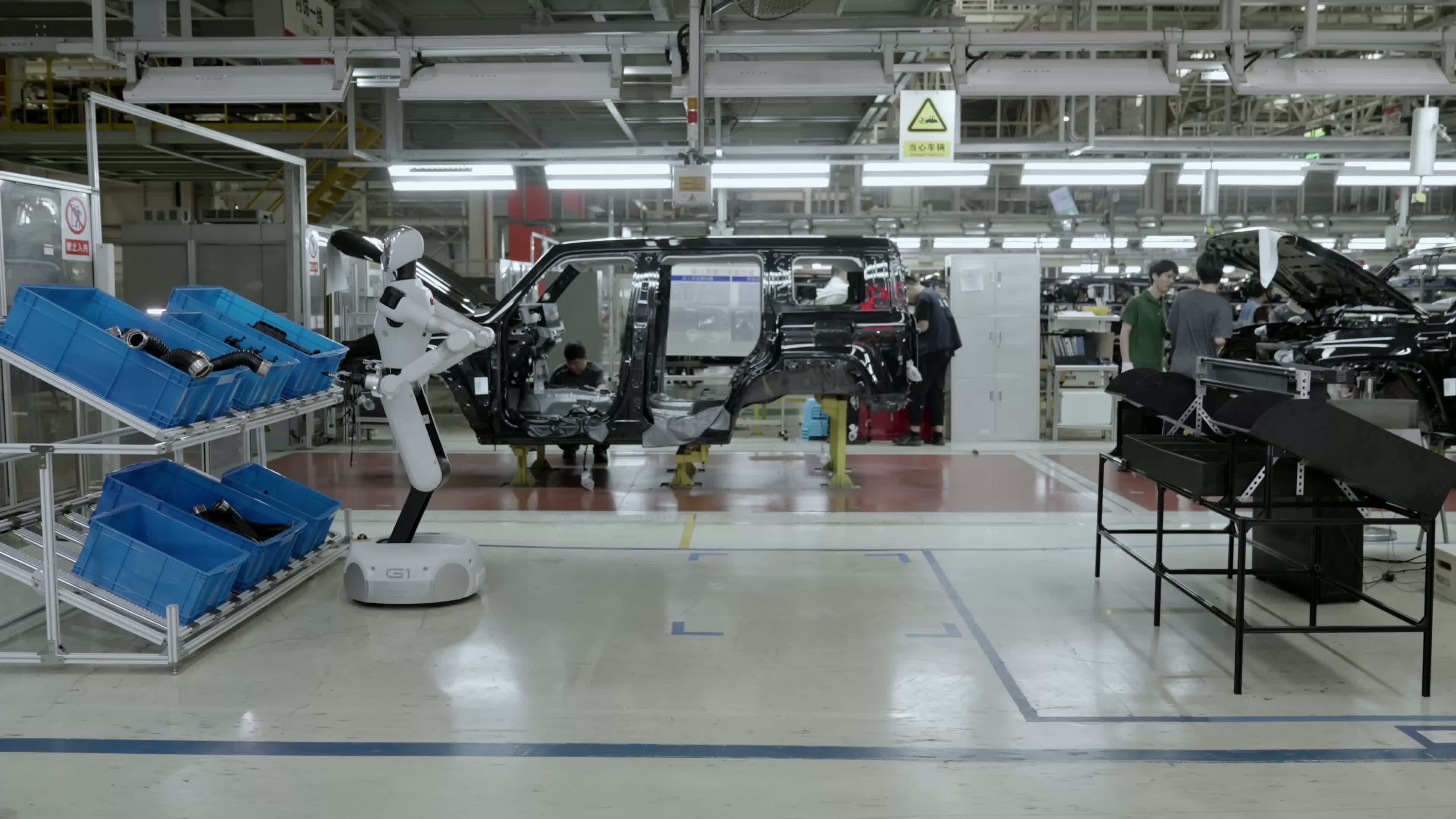
在工业产线中执行零部件分拣、物料搬运、组装、上下料等作业。
在医疗和康养场景中执行药品运送、库存管理、物资配送和照护辅助。
用于儿童知识启蒙、专业课程和创新科研应用等开发与验证场景。








当前产品还没有匹配到可确认的资讯关联。

Booster K1 是加速进化官网定位的具身开发入门级平台。官网公开资料显示,K1 起售价 3.99 万元,约 95cm、约 19.5kg、22 自由度,极客版、教育版、专业版分别提供 48、117、200 TOPS AI 算力,并面向 RoboCup KidSize、教育课程和具身开发入门场景。

Booster T1 是加速进化官网面向开发者、科研团队和 RoboCup 场景展示的人形机器人开发平台。官网资料显示,T1 约 1.18m、约 30kg,支持基础版、标准版、定制版三档配置,最高可到 41 自由度,搭载 NVIDIA AGX Orin 提供 200 TOPS AI 算力,持续行走约 2 小时、持续站立约 4 小时。


Galbot G1 是银河通用的轮式双臂通用机器人,面向商业零售、工业制造、医疗康养、家庭服务和教育科研等场景。
本地镜像中概要模块和详细参数表存在部分差异,例如续航出现 8h 与 10h 两种口径,本站按来源保留并标记为待核验。