
工作台全域灵巧操作
官网描述 M7 可覆盖整个工作台,强调双目视觉、3D LiDAR 和十字轴手腕。
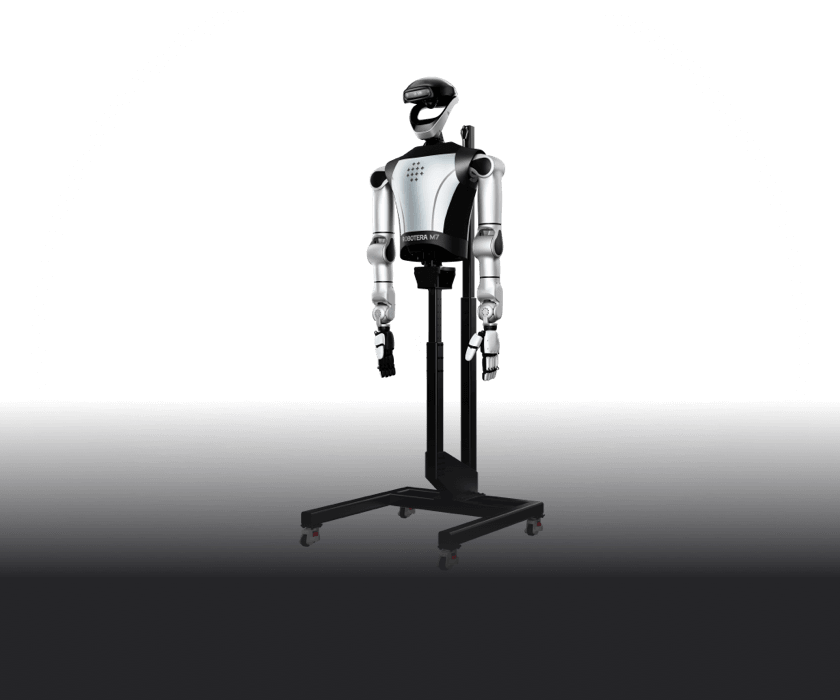
新生代全尺寸半身人形机器人,官网公开指标包括 43 自由度、1660mm 臂展和 2.1m 操作范围直径。

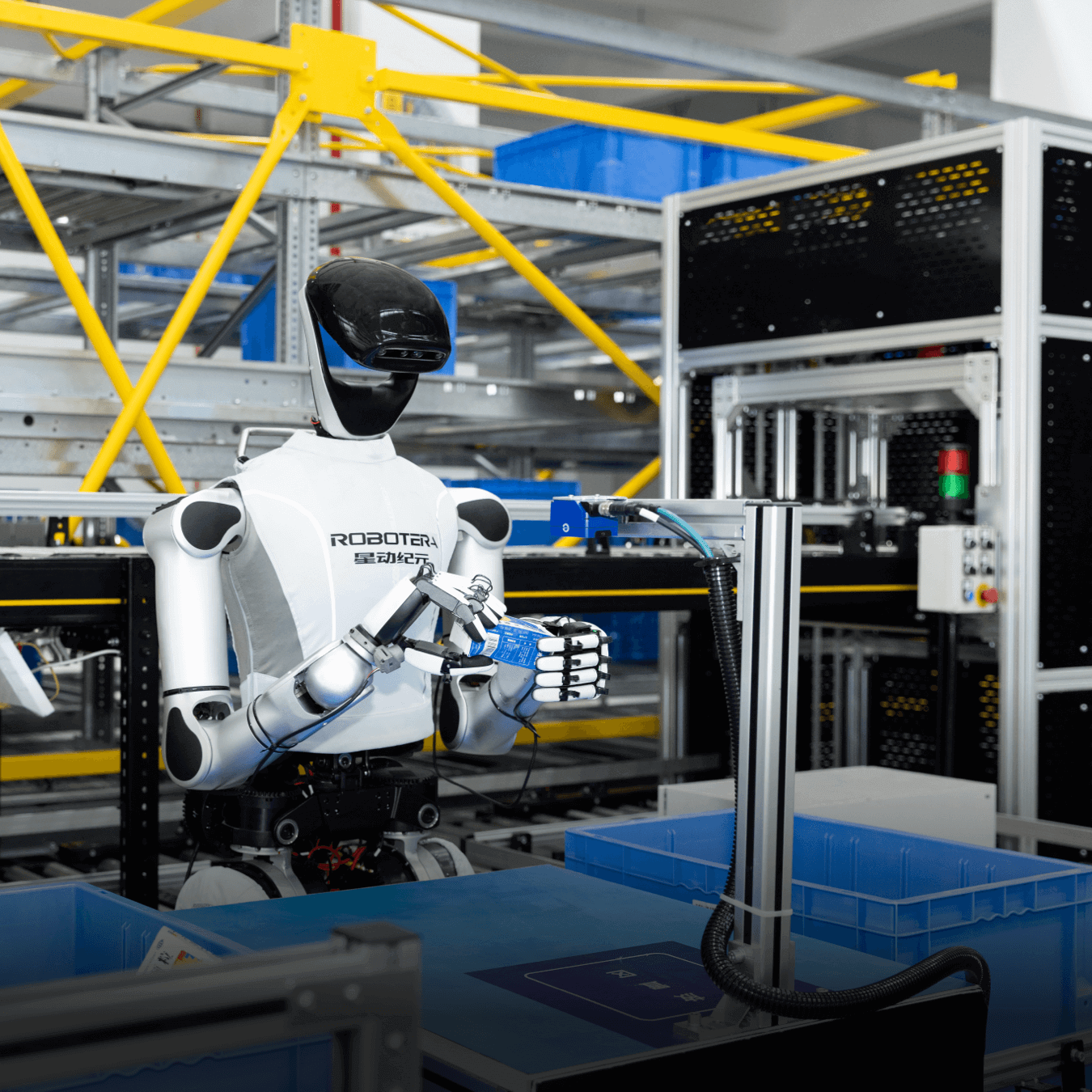
星动 M7 是 RobotEra 官网产品矩阵中的全尺寸半身人形机器人,公开资料显示其具备 43 自由度(含灵巧手)、1660mm 臂展和 2.1m 操作范围直径,面向物流、制造、商业服务和科研数据采集。
星动 M7 是 RobotEra 官网产品矩阵中的全尺寸半身人形机器人,公开资料显示其具备 43 自由度(含灵巧手)、1660mm 臂展和 2.1m 操作范围直径,面向物流、制造、商业服务和科研数据采集。
工作台全域灵巧操作:官网描述 M7 可覆盖整个工作台,强调双目视觉、3D LiDAR 和十字轴手腕。
XHAND 1 灵巧手:M7 配置说明中列出 12 自由度灵巧手。
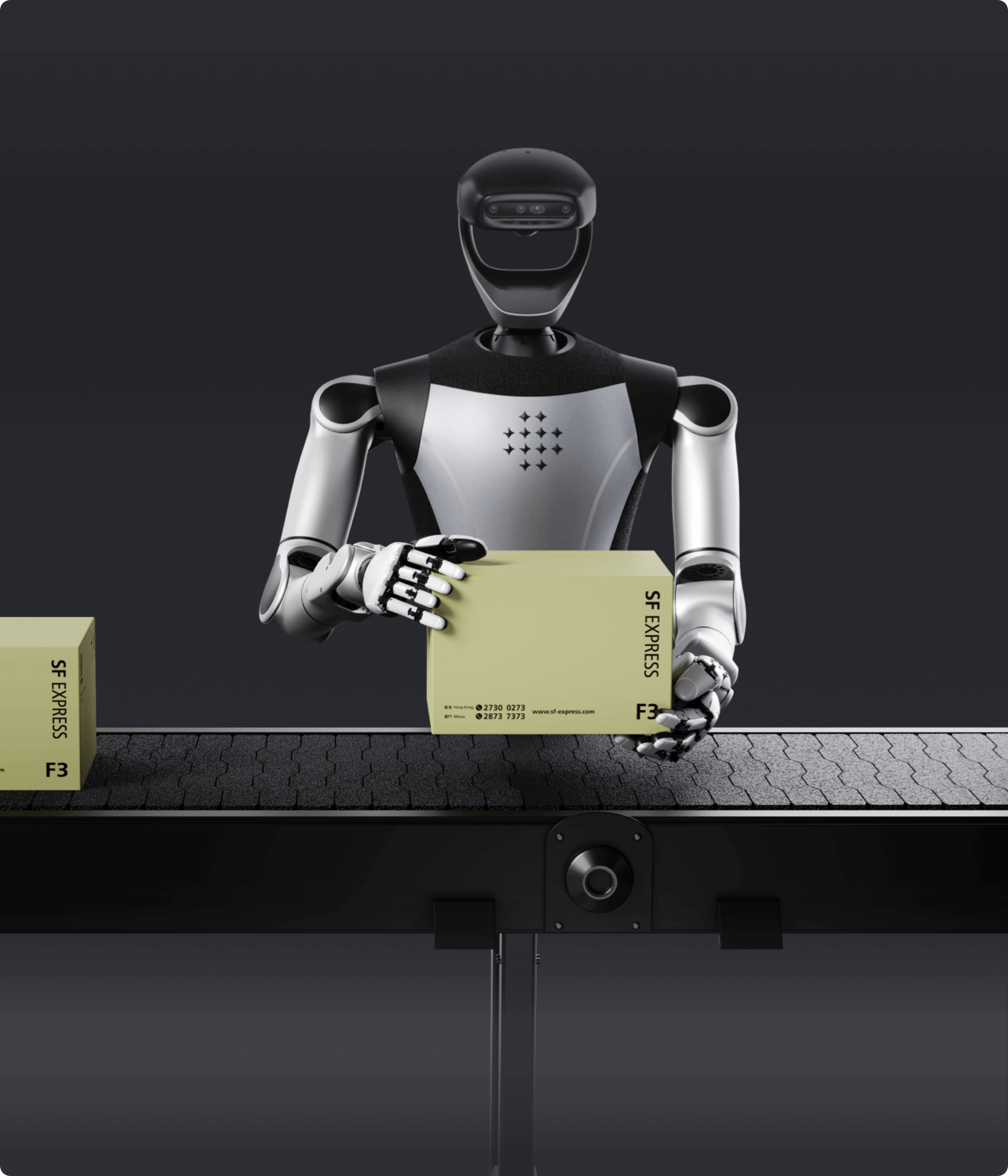
跨场景应用:官网列出物流分拣、智能扫码、工位操作、装配检测、调酒服务和科研数据采集等场景。
43 自由度(含灵巧手)
1660mm 臂展
2.1m 操作范围直径
双目视觉和 3D LiDAR
支持遥操作
官网描述 M7 可覆盖整个工作台,强调双目视觉、3D LiDAR 和十字轴手腕。
M7 配置说明中列出 12 自由度灵巧手。
官网列出物流分拣、智能扫码、工位操作、装配检测、调酒服务和科研数据采集等场景。
| 二次开发 | 支持遥操作视觉与数据采集场景 |
|---|
| 传感器 | Intel Realsense / Stereo |
|---|
| 水平工作范围 | 2.1m | |
|---|---|---|
| 单臂臂展 | 1660mm |
| 自由度 | 43(含灵巧手) |
|---|
星动 M7 是 RobotEra 官网产品矩阵中的全尺寸半身人形机器人,公开资料显示其具备 43 自由度(含灵巧手)、1660mm 臂展和 2.1m 操作范围直径,面向物流、制造、商业服务和科研数据采集。
用于智能分拣和扫码。
用于工位操作、装配和检测。
用于调酒、互动服务等固定点位任务。
用于上半身控制、遥操作和数据采集。





Booster T1 是加速进化官网面向开发者、科研团队和 RoboCup 场景展示的人形机器人开发平台。官网资料显示,T1 约 1.18m、约 30kg,支持基础版、标准版、定制版三档配置,最高可到 41 自由度,搭载 NVIDIA AGX Orin 提供 200 TOPS AI 算力,持续行走约 2 小时、持续站立约 4 小时。

Fourier GR-3C 是傅利叶 GR-3 系列中的功能服务型版本,配备环屏头域与强化外壳,支持头域模组、视觉模组、灵巧手和全身遥操等定制化配置。
星动 M7 在本站归类为半身人形,对象类型为机器人本体。
当前条目来自 RobotEra 官网本地镜像、前端公开文案和官网产品矩阵。