开源硬件本体
开放物料清单、结构图纸、整机 STEP、装配指南与操作演示视频。
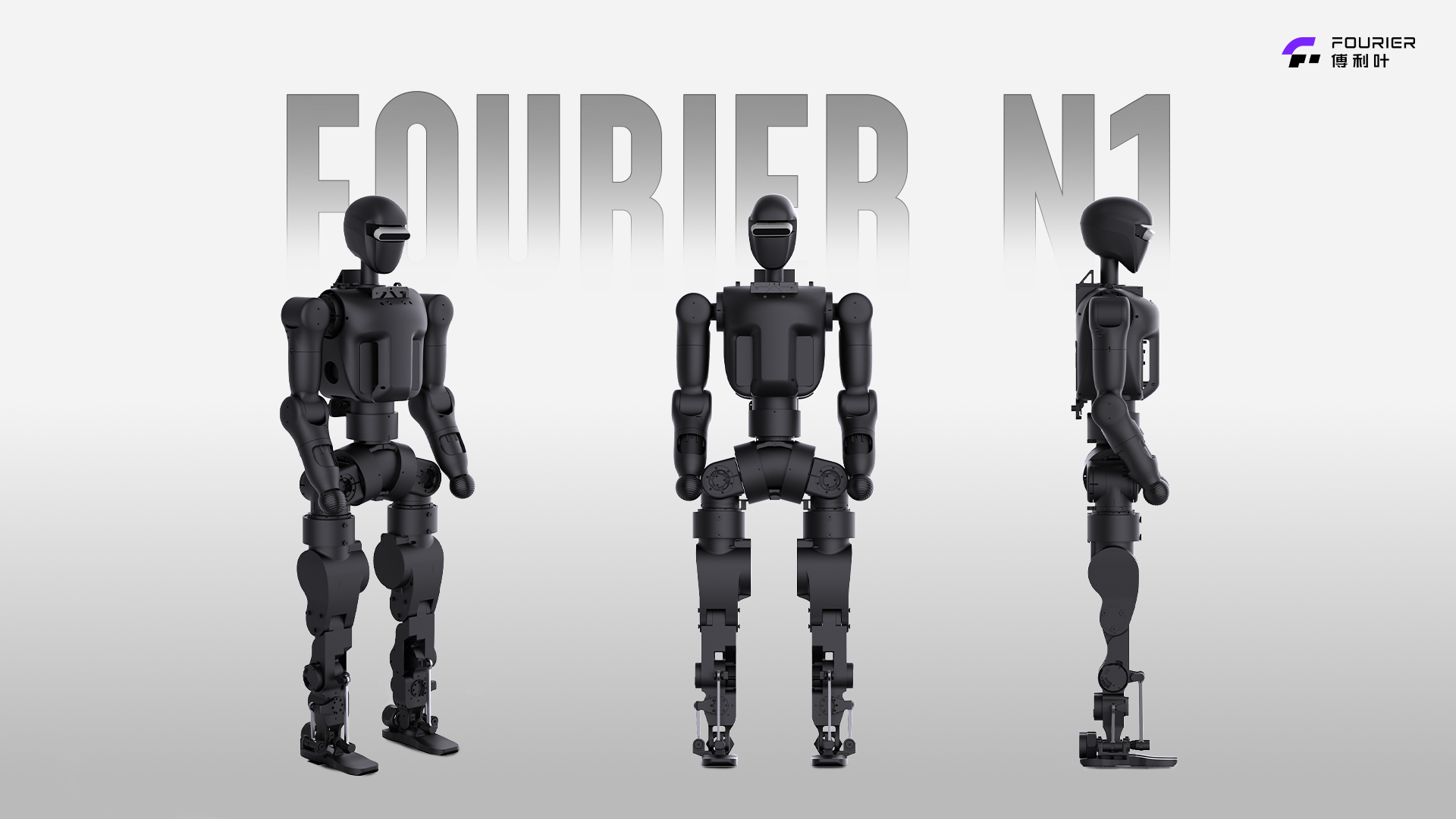
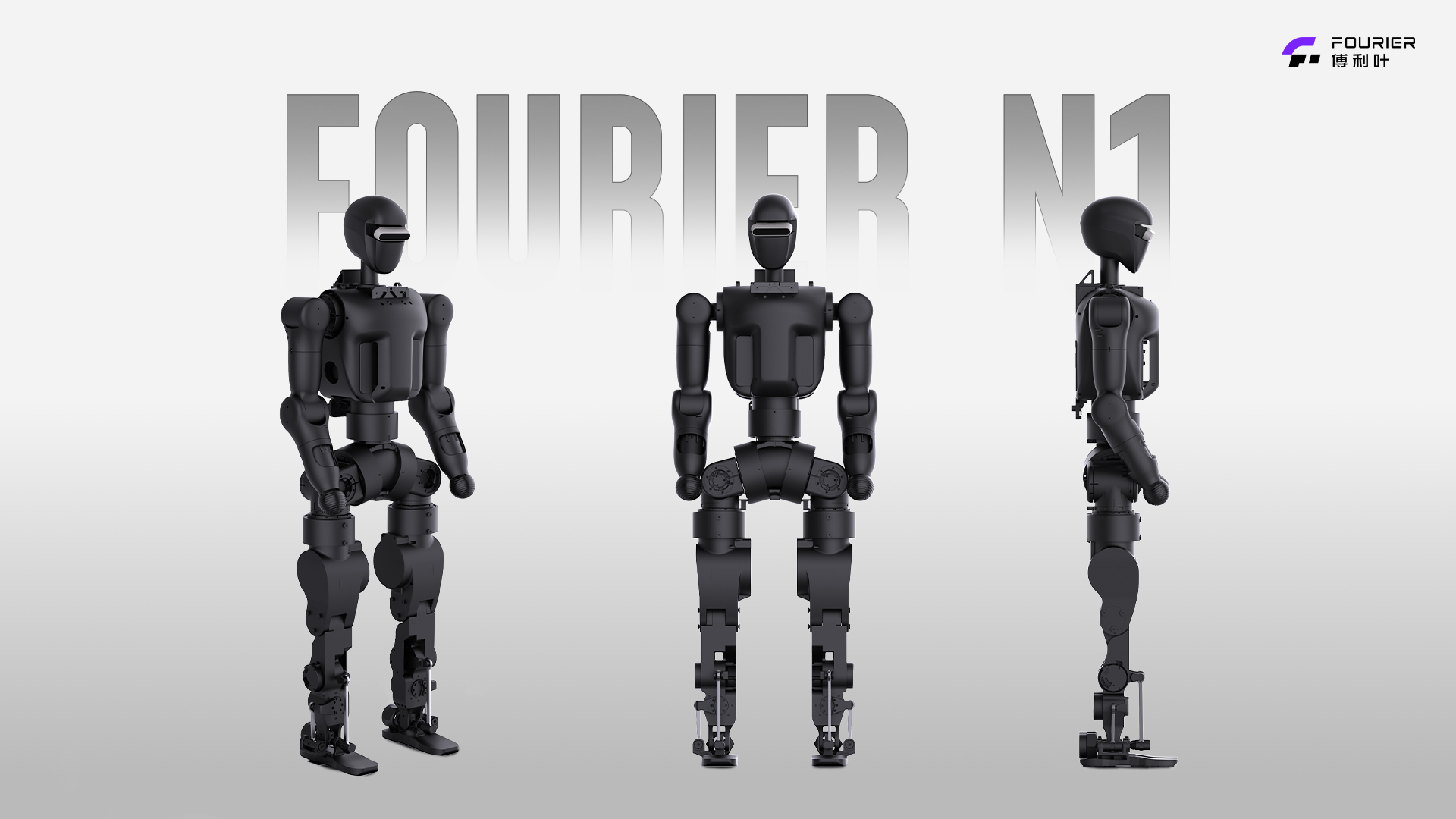
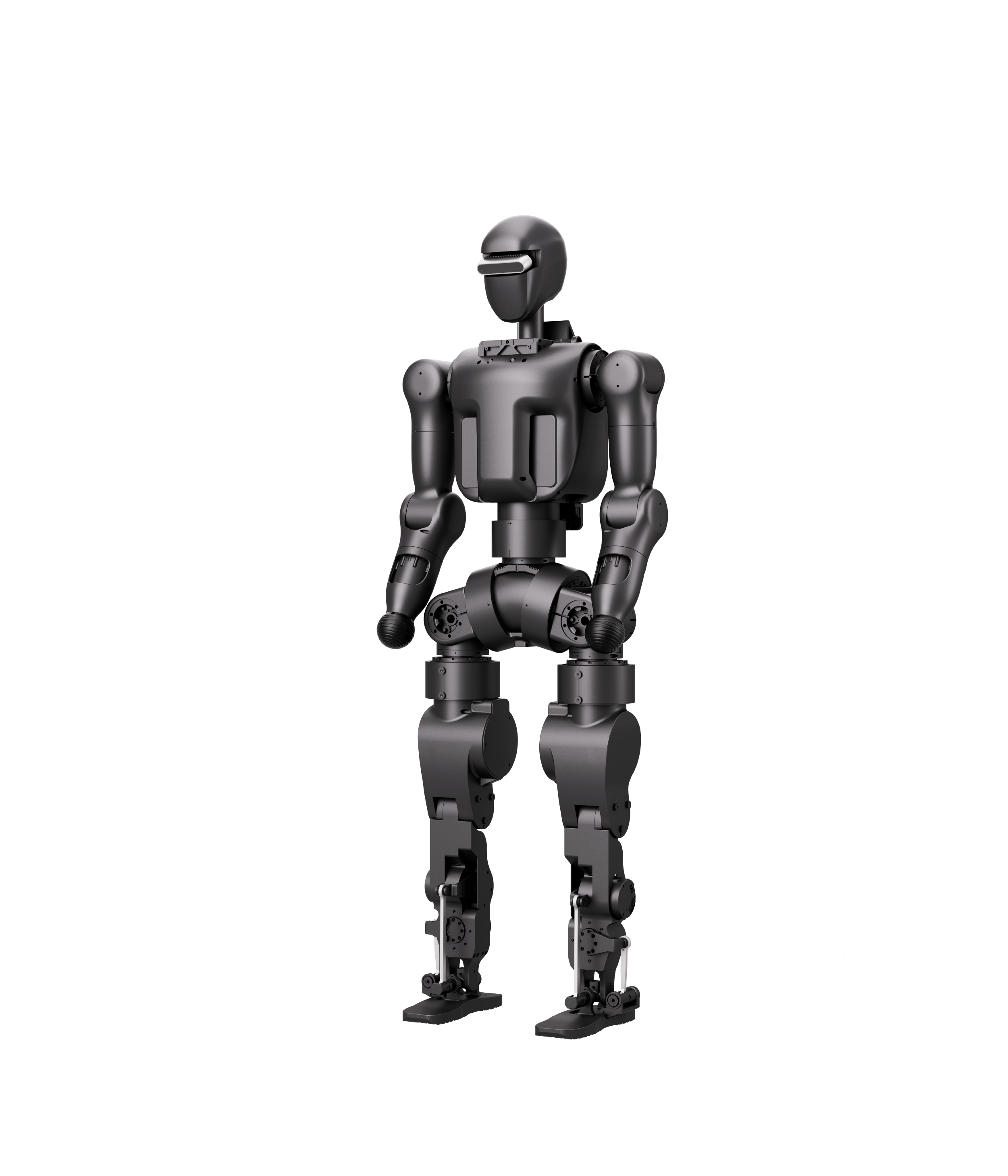
Fourier Nexus 开源生态矩阵的首个落地项目,130cm、38kg、23 自由度、2 小时以上续航。
Fourier N1 是傅利叶首款开源人形机器人,作为 Fourier Nexus 开源生态矩阵的首个落地项目,公开页面显示其身高 130cm、体重 38kg、全身 23 自由度、续航 2 小时以上,并开放 BOM、STEP、图纸、装配 SOP 和基础操作软件。
作为Fourier Nexus开源生态矩阵的首个落地项目,N1聚焦于高泛用运动控制、多模态模型融合及未来形态演进,助力科研团队快速验证算法与应用。
机身采用铝合金与工程塑料复合结构,硬件设计更为简洁,显著提升稳定性与耐用性,插拔式电池设计满足多场景研发及高频测试需求。
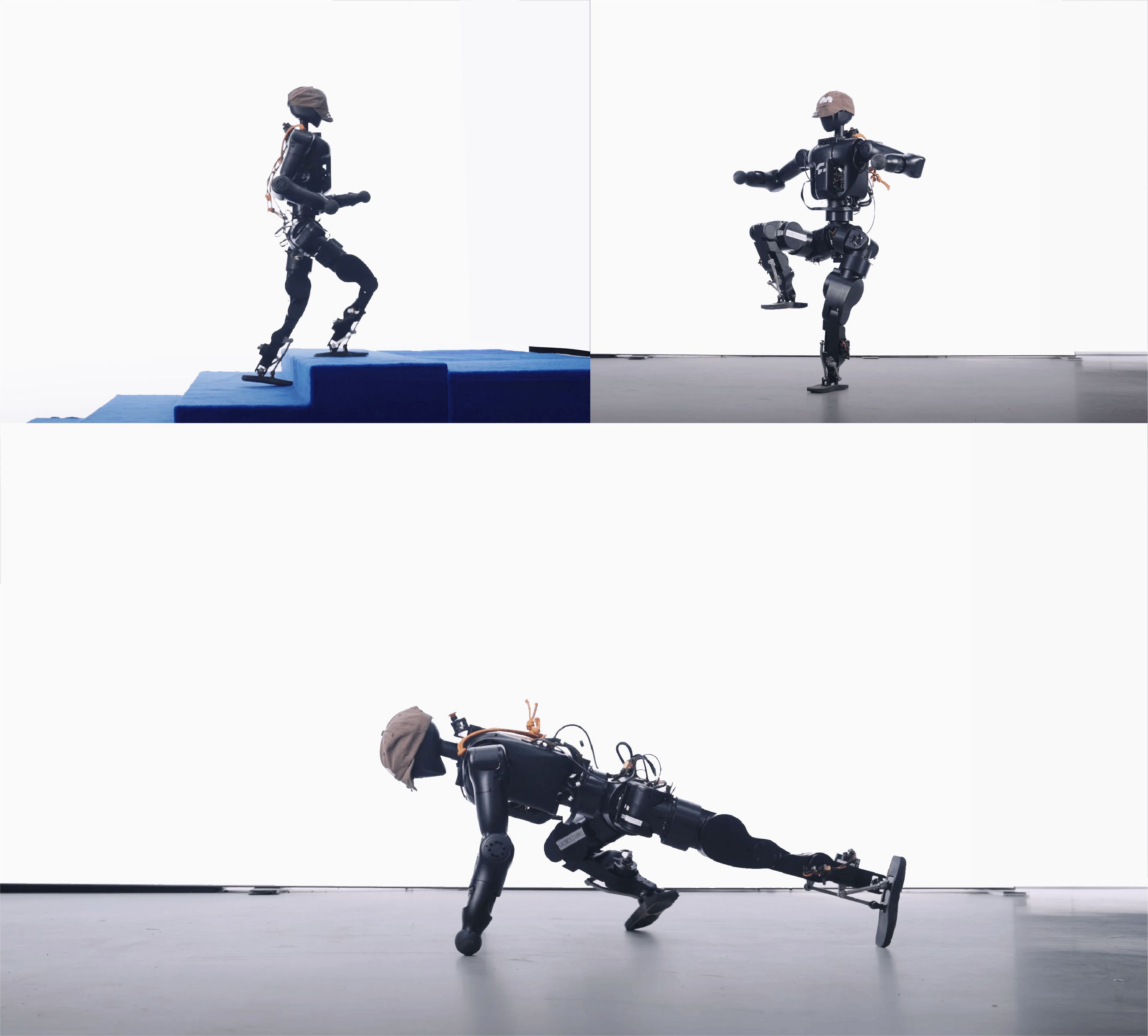
N1历经长周期、高强度的运动算法验证,累计完成超过1000小时的户外复杂地形测试,关键性能稳定达标。开源硬件本体资源包和基础操作软件代码,助力开发者快速上手完整复刻。
支持快走、奔跑、15°~20°坡度斜坡通行、20厘米高度楼梯攀爬、单脚站立及撑地爬起等高难度动作。
傅利叶积极投入具身智能生态建设,与全球20多家顶尖科研机构和头部企业
开展联合研发,推动具身智能技术走进真实场景,探索人机共生新形态。
傅利叶牵头搭建Fourier Nexus通用机器人生态网络,通过硬件开发、算法开源、数据共享三维架构,持续降低行业研发门槛,推动跨行业、跨场景的协同创新。
傅利叶陆续开源Fourier ActionNet全尺寸人形机器人数据集、N1机器人本体资源包,并计划开放覆盖全身控制、多任务协同等关键技术模块,携手全球开发者共同探索具身智能技术边界。
身高 130cm
体重 38kg
全身自由度 23 个
续航 2 小时以上
最高步速 3.5 米/秒
15°-20° 坡度斜坡通行
20cm 楼梯攀爬
开放 BOM、STEP、图纸、装配 SOP 和 GitHub
开放物料清单、结构图纸、整机 STEP、装配指南与操作演示视频。
基础操作软件代码已开放 GitHub,包含通讯接口封装。

文章称 N1 累计完成超过 1000 小时户外复杂地形测试,单次连续运行超过 72 小时。
N1 是 Nexus-01,连接硬件开发、算法开源和数据共享生态。
| 二次开发 | BOM、整机 STEP、整机图纸、装机 SOP、基础操作软件 GitHub |
|---|
| 越障/台阶高度 | 20 厘米高度楼梯攀爬 | |
|---|---|---|
| 最大坡度 | 15°-20° 坡度斜坡通行 |
| 最高速度 | 3.5 米/秒 |
|---|
| 自由度 | 23 个 |
|---|
| 续航时间 | 2 小时以上 |
|---|
| 重量 | 38kg | |
|---|---|---|
| 高度 | 130cm |
Fourier N1 是傅利叶首款开源人形机器人,作为 Fourier Nexus 开源生态矩阵的首个落地项目,公开页面显示其身高 130cm、体重 38kg、全身 23 自由度、续航 2 小时以上,并开放 BOM、STEP、图纸、装配 SOP 和基础操作软件。
用于高泛用运动控制器和步态算法验证。
用于多模态模型结合和具身载体形态推演。
通过 BOM、图纸、装配指南和基础软件降低复刻门槛。
傅利叶机器人创新营 傅利叶致力为改变世界的梦想赋予翅膀。机器人创新营是傅利叶专为怀揣机器人梦想的年轻人们打造的一个技术实操集训。 在这里,你可以和我们的研发人员深入交流,实践你的猜想,把脑洞拉进现实。我们坚信,每一次大胆尝试都有无限可能。 真机实操 真实体验 我们将提供充足数量的机器人设备,学员们全程可在真机上进行调试,并由傅利叶人形机器人团队提供全程的培训、支持和保障,让学员们真实体验人形机器人带来的无限遐想。 任务+比赛结合 激发创...
2025-04-10 傅利叶发布首款开源人形机器人Fourier N1,加速行业生态共建2025年4月11日,上海 —— 通用机器人公司傅利叶正式发布首款开源人形机器人Fourier N1,并同步开放涵盖物料清单、设计图纸、装配指南、基础操作软件在内的完整本体资源包。作为傅利叶“Nexus开源生态矩阵”的首个落地项目(“N1”即“Nexus-01”),N1将为全球机器人和具身智能开发者提供一个开放创新的技术基座,加速高泛用性运动控制器、多模态模
2025-04-11 傅利叶发布首款开源人形机器人Fourier N1,加速行业生态共建2025年4月11日,上海 —— 通用机器人公司傅利叶正式发布首款开源人形机器人Fourier N1,并同步开放涵盖物料清单、设计图纸、装配指南、基础操作软件在内的完整本体资源包。作为傅利叶“Nexus开源生态矩阵”的首个落地项目(“N1”即“Nexus-01”),N1将为全球机器人和具身智能开发者提供一个开放创新的技术基座,加速高泛用性运动控制器、多模态模
2025-05-09 傅利叶十年,升级核心战略:赋能于人,做“有温度”的具身智能2025年5月9日,上海——傅利叶十周年庆典暨首届具身智能生态峰会在上海正式召开。本次大会以“十年共创,具身成翼”为主题,汇聚了来自通用机器人与医疗康复领域的顶尖专家学者、合作伙伴与投资机构,共同探索具身智能在未来十年的技术应用与生态发展。傅利叶创始人兼CEO顾捷分享创业十年深刻体会,并提出了“立足康养、聚焦交互、服务于人”的下一个十年核心战略。 傅利叶创始
2025-04-24 GReAT 2025:以具身智能变革康复未来2025年4月23日,全球智能康复与机器人技术峰会(GReAT 2025)在上海张江机器人谷正式召开。本次大会以“携手共进,定义康复未来”为主题,汇聚了来自全球康复与机器人行业的近百名顶尖专家、学者与合作伙伴,共同探讨康复与辅助技术的发展与转化,聚焦具身智能在康复场景中的跨界融合与应用,探索智能康复的未来路径。 傅利叶牵头发起“具身智能康复技术发展倡议” 作
2025-04-20 2025上海半马“鸣枪”,傅利叶携多款人形机器人“点燃”赛事2025上海半马“鸣枪”,傅利叶携多款人形机器人“点燃”赛事 2025年04月20日 4月20日早上7时,2025上海半程马拉松在浦东新区鸣枪起跑,1.5万名中外跑者参与比赛,打卡陆家嘴金融城、世博园区、前滩商务区等地标,共赏长达21.0975公里的上海“城市画卷”。傅利叶携手GRx系列、Fourier N1人形机器人亮相赛场参与互动、热身,用科技温度点燃运动激情。 傅利叶人形机器人矩阵首秀上海半马:热血助威+护航后援 作为荣膺世界田联...
Fourier GR-1 是傅利叶官网描述的通用人形机器人助手,公开页面称其是第一台实现量产交付的双足人形机器人,具备成年人等身大小外观结构、44 个全身自由度、5 公里/小时步态行走速度和 230 N.m 最大关节扭矩。
Booster K1 是加速进化官网定位的具身开发入门级平台。官网公开资料显示,K1 起售价 3.99 万元,约 95cm、约 19.5kg、22 自由度,极客版、教育版、专业版分别提供 48、117、200 TOPS AI 算力,并面向 RoboCup KidSize、教育课程和具身开发入门场景。

Booster T1 是加速进化官网面向开发者、科研团队和 RoboCup 场景展示的人形机器人开发平台。官网资料显示,T1 约 1.18m、约 30kg,支持基础版、标准版、定制版三档配置,最高可到 41 自由度,搭载 NVIDIA AGX Orin 提供 200 TOPS AI 算力,持续行走约 2 小时、持续站立约 4 小时。


Fourier GR-3C 是傅利叶 GR-3 系列中的功能服务型版本,配备环屏头域与强化外壳,支持头域模组、视觉模组、灵巧手和全身遥操等定制化配置。
Fourier N1 在本站归类为开源人形,对象类型为机器人本体。
当前条目来自傅利叶官网本地镜像、产品页面、下载中心和公开文章,参数值按来源页面拆入参数库。