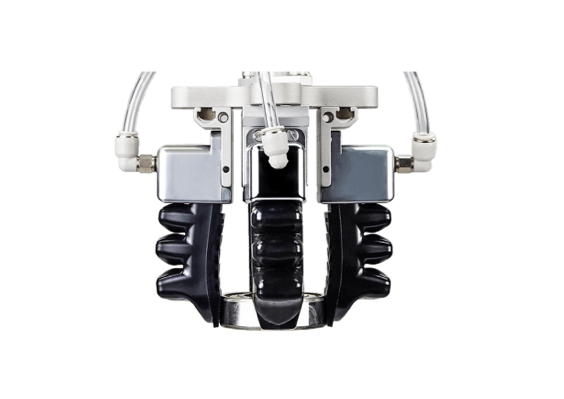
具有撞击保护
开放性的程序接口和拓展接口 陆续开源机械臂控制程序及控制接口,机械臂末端可快速换装不同执行器
宇树科技机械臂Z1拥有开放性的程序接口和拓展接口, 适用于各种移动机器人机载机械臂、电商物流、新消费、日常生活等。
Unitree Z1 的资料页已整理为产品定位、关键能力、参数、版本、影像资料、资料链接和关联内容。
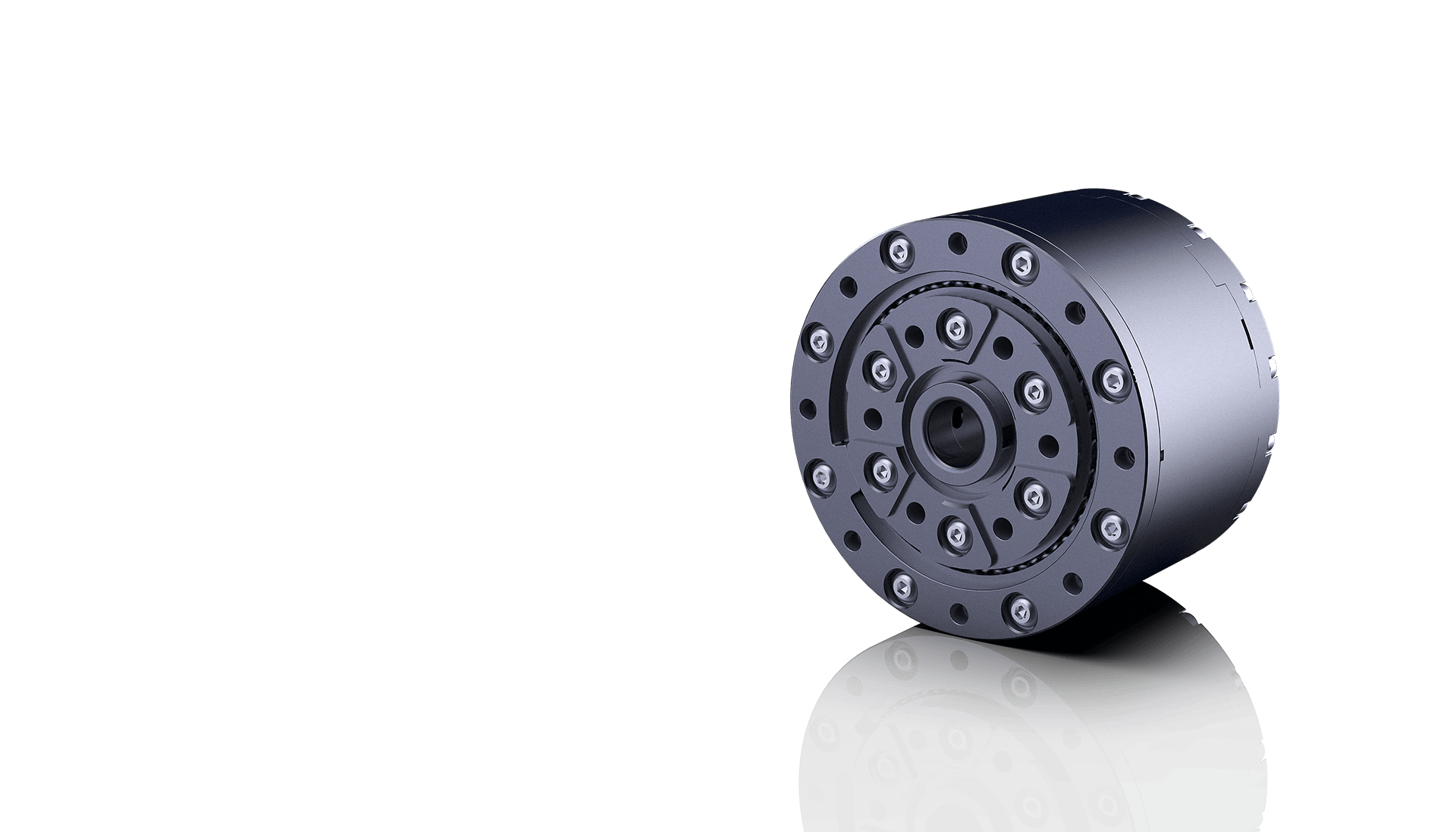
足够的精度: 支持关节力控
最大扭矩: 33N·m
重量: 405g
力控精度: ~0.2N·m
尺寸: Φ65*52mm
控制频率: 1KHz
自由度: 6轴
负载: 2kg
具有撞击保护:开放性的程序接口和拓展接口 陆续开源机械臂控制程序及控制接口,机械臂末端可快速换装不同执行器
电机控制指令:力矩、角度、角速度,刚度、阻尼 能够与
Aliengo或B1:等四足及其他移动机器人, 协同完成复杂任务,探索各种应用场景。
[2]:由于每个关节采用的减速比较低,故整机位置控制刚度较低,如果采用的控制方式不够优化,机械臂运动时会有较大的位置控制误差及晃动。 本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
能够与:Aliengo或B1 等四足及其他移动机器人,
足够的精度: 支持关节力控
最大扭矩: 33N·m
重量: 405g
力控精度: ~0.2N·m
尺寸: Φ65*52mm
控制频率: 1KHz
自由度: 6轴
负载: 2kg
重复定位精度: ~0.1mm
功率: 峰值500w
足够的负载
陆续开源机械臂控制程序及控制接口,机械臂末端可快速换装不同执行器
开放性的程序接口和拓展接口 陆续开源机械臂控制程序及控制接口,机械臂末端可快速换装不同执行器
力矩、角度、角速度,刚度、阻尼 能够与
等四足及其他移动机器人, 协同完成复杂任务,探索各种应用场景。
由于每个关节采用的减速比较低,故整机位置控制刚度较低,如果采用的控制方式不够优化,机械臂运动时会有较大的位置控制误差及晃动。 本产品为民用机器人产品,请各位用户不要危险性改造和使用机器人。
Aliengo或B1 等四足及其他移动机器人,
740mm 重复定位精度
电压24V 电流>20A 接口
±150° 180°/s
开放性的程序接口和拓展接口 陆续开源机械臂控制程序及控制接口,机械臂末端可快速换装不同执行器
宇树科技机械臂Z1拥有开放性的程序接口和拓展接口, 适用于各种移动机器人机载机械臂、电商物流、新消费、日常生活等。
| 二次开发 | 有/可咨询 | 开放控制程序、控制接口和拓展接口 |
|---|
| 负载 | 约 3kg | |
|---|---|---|
| 最大关节扭矩 | 约 33N.m |
| 自由度 | 6 |
|---|
| 重量 | 约 4.5kg | |
|---|---|---|
| 长度 | 740mm |
Z1 PRO 是 Unitree Z1 的增强版。
Z1 AIR 是 Unitree Z1 的轻量版。
应用场景呈多元化
各种移动机器人机载机械臂、电商物流、新消费、日常生活等。
探索各种应用场景,



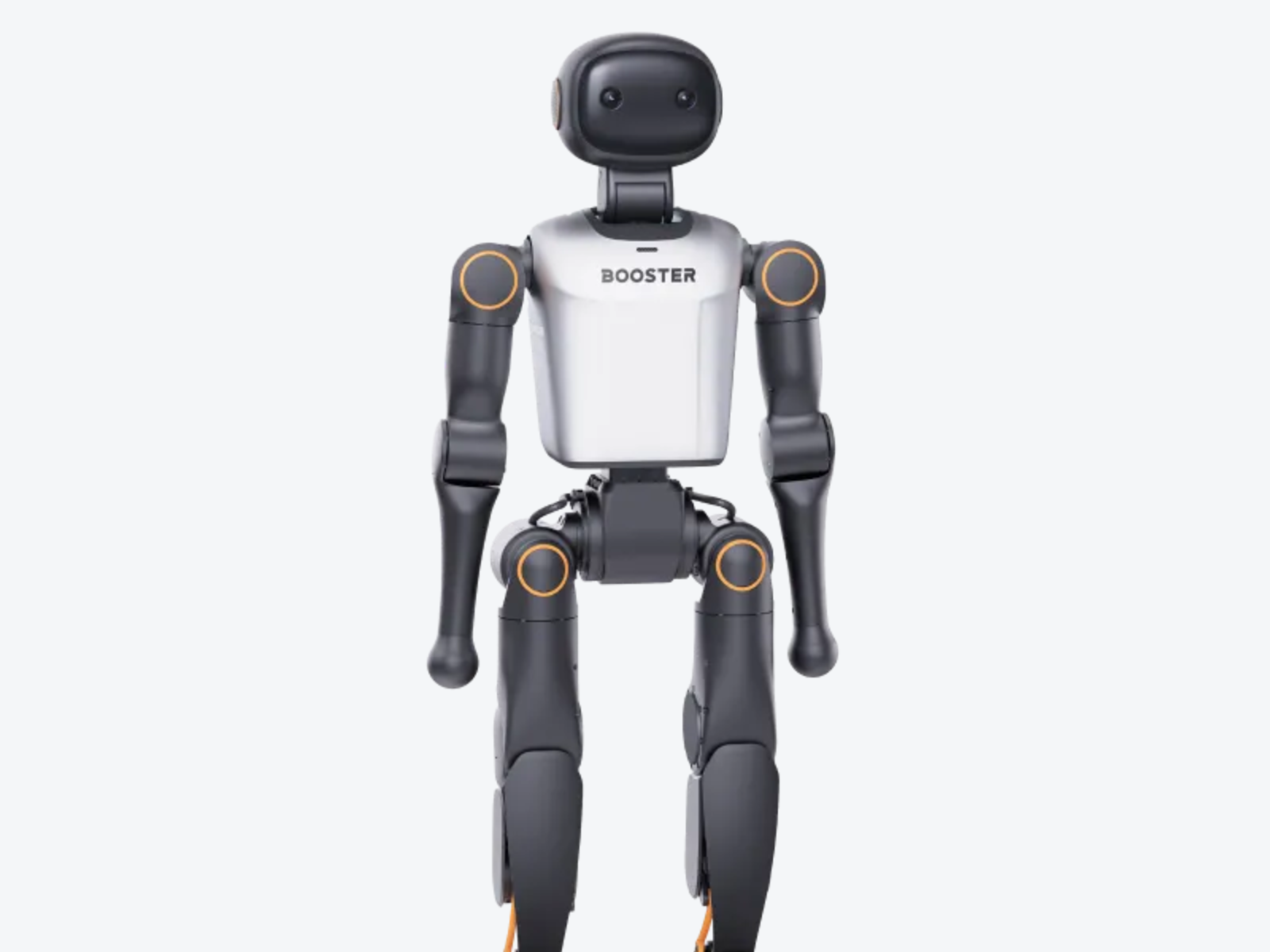
Booster K1 是加速进化官网定位的具身开发入门级平台。官网公开资料显示,K1 起售价 3.99 万元,约 95cm、约 19.5kg、22 自由度,极客版、教育版、专业版分别提供 48、117、200 TOPS AI 算力,并面向 RoboCup KidSize、教育课程和具身开发入门场景。



可以按产品线、形态、尺寸级别、重量、自由度、续航、价格和关联硬件查看。
6轴;自重 4.3 到 4.5kg;负载 2kg 到 3kg 以上;最大臂展 740mm