分布式训练,高效性能
平台基于高性能分布式训练架构,可实现计算任务的弹性调度与并行加速,按负载资源动态扩展,实现90% GPU利用率。 训练及推理流程
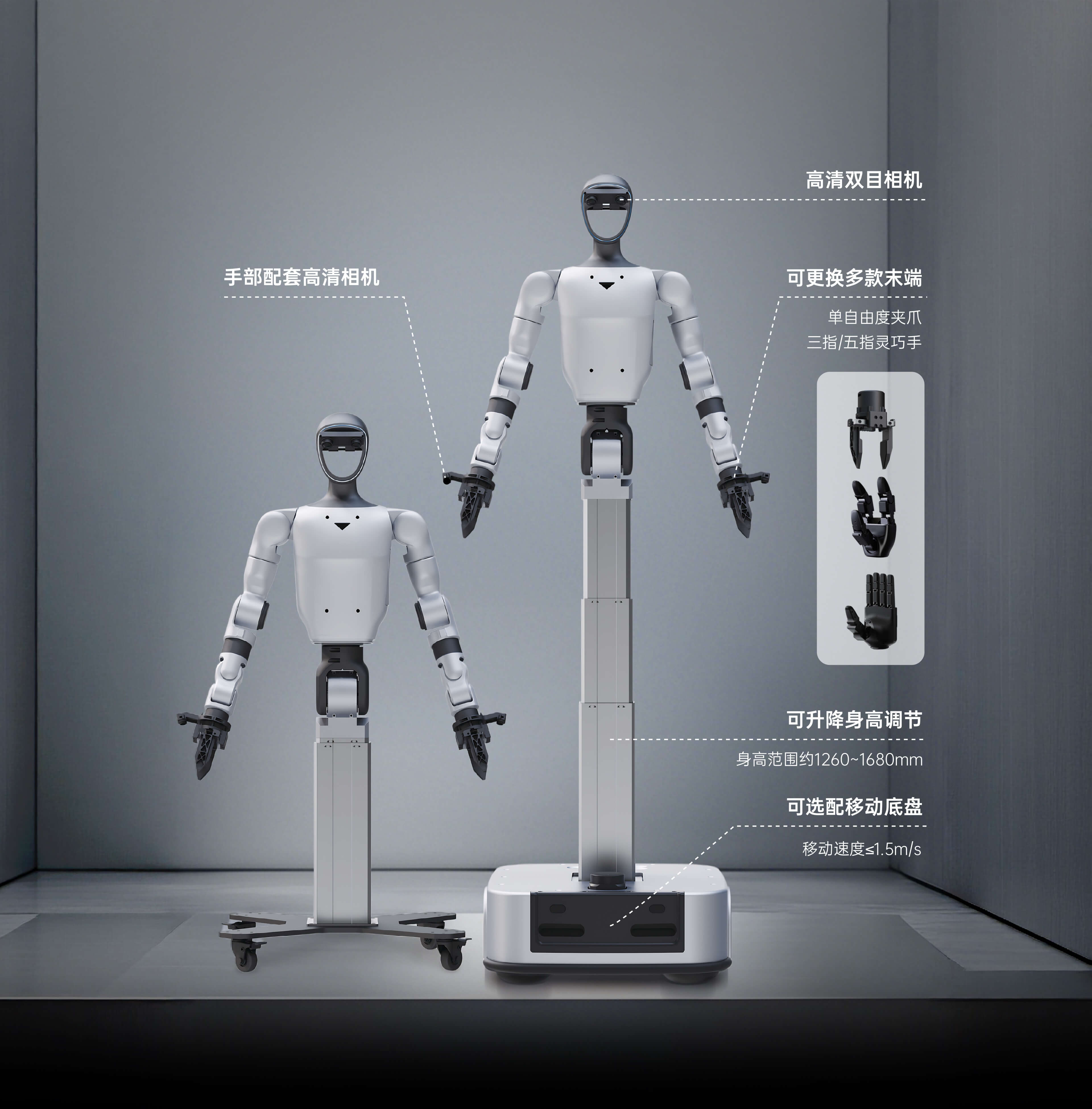
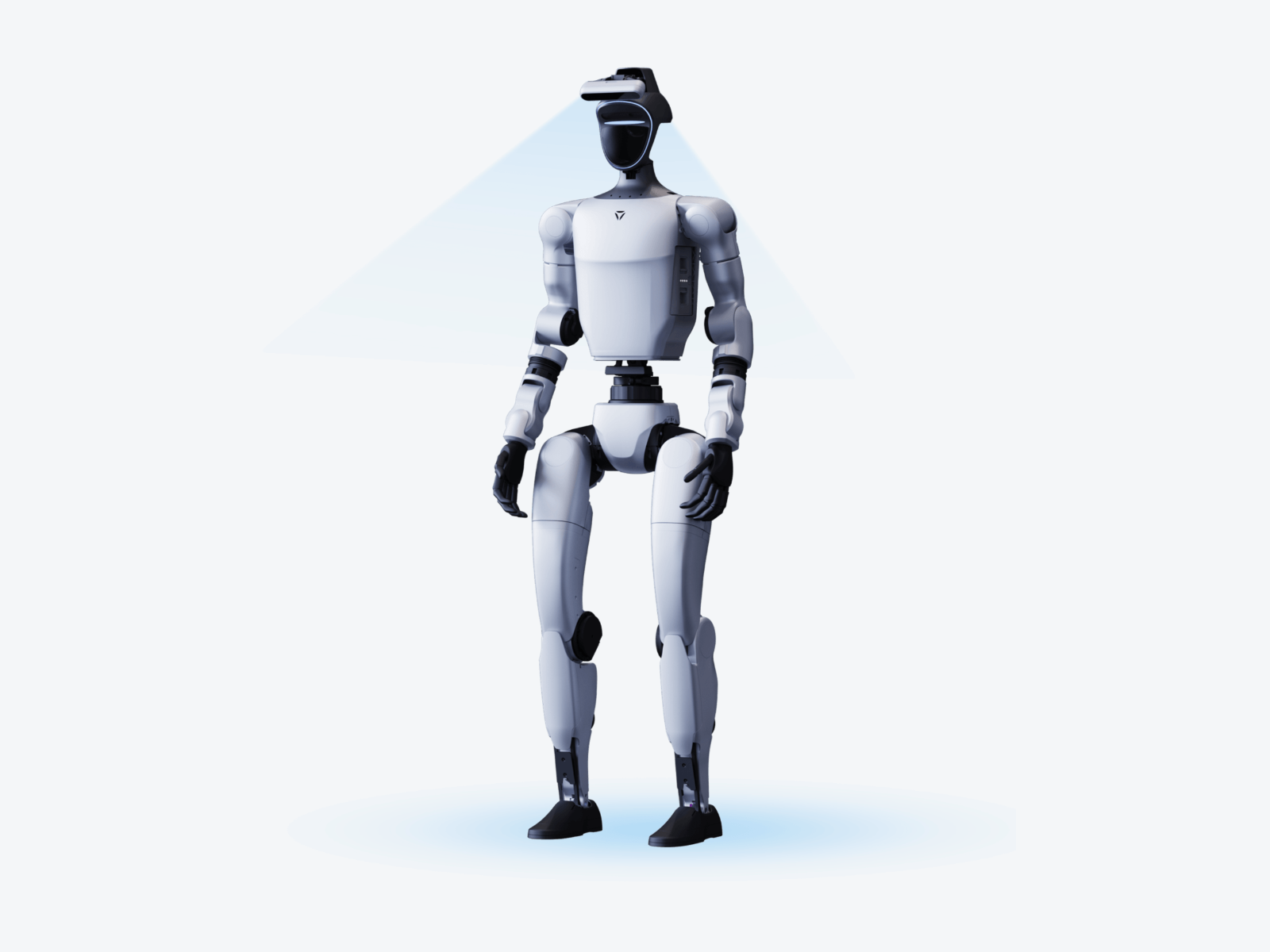
Unitree G1-D 是 应用方案产品,核心信息包括整机自由度不含末端为 19、手臂自由度 7x2、支持多样化末端配置。
Unitree G1-D 的资料页已整理为产品定位、关键能力、参数、版本、影像资料、资料链接和关联内容。
整机自由度(不含末端):: 19
手臂自由度:: 7×2
整机尺寸(立柱最低高度): 约1260x500x500mm
整机尺寸(立柱最高高度): 约1680x500x500mm
整机重量(含电池): 约50kg
整机自由度(不含末端): 17
单臂自由度(不含末端): 单臂最大负载【1】
单臂最大负载【1】: 约3kg
分布式训练,高效性能:平台基于高性能分布式训练架构,可实现计算任务的弹性调度与并行加速,按负载资源动态扩展,实现90% GPU利用率。 训练及推理流程
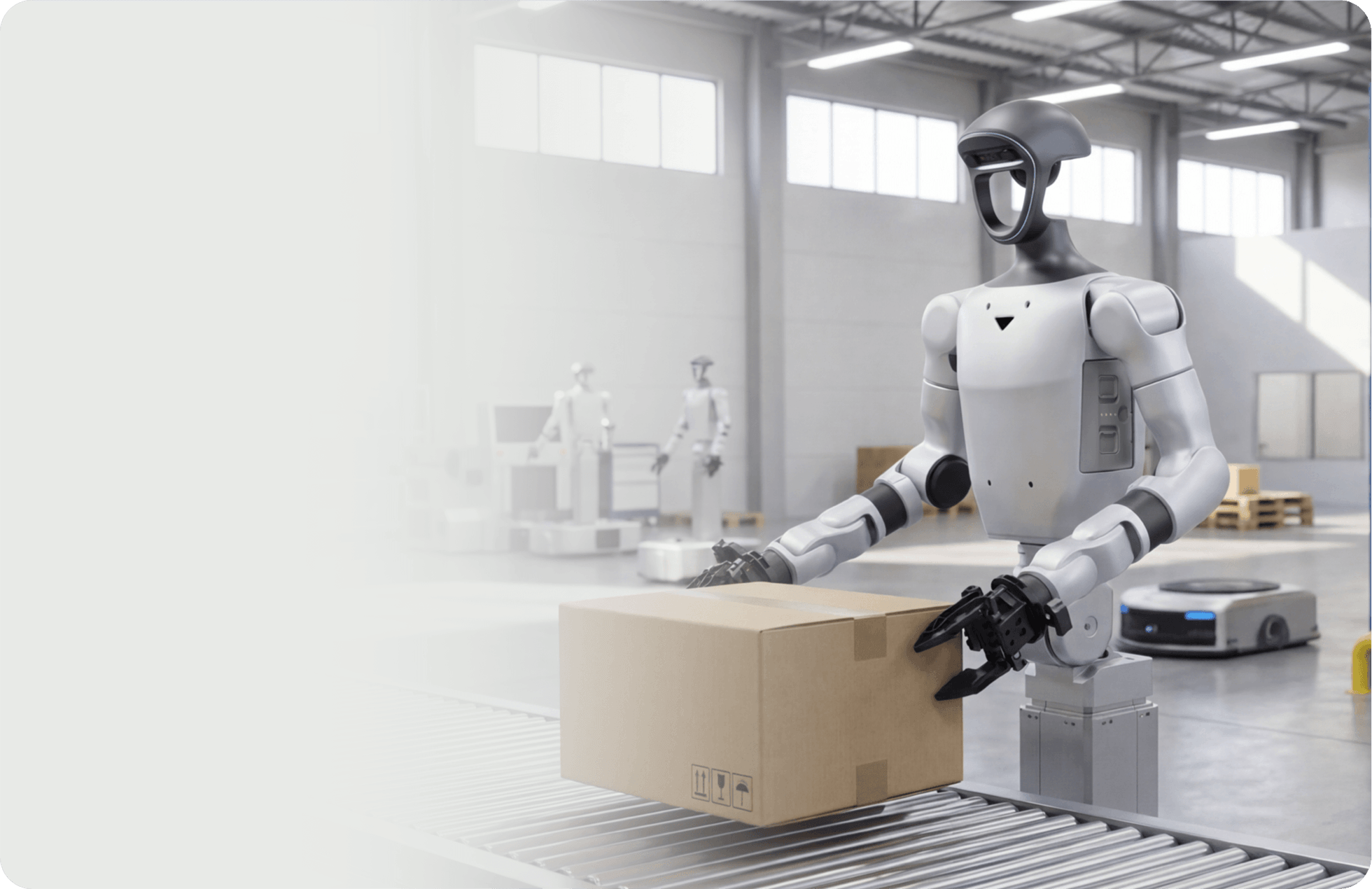
工业:UnifoLM-WMA-0: 跨机器人本体的开源世界模型
二次开发【3】:[1] 手臂最大负载,不同手臂伸展姿态下,差异很大
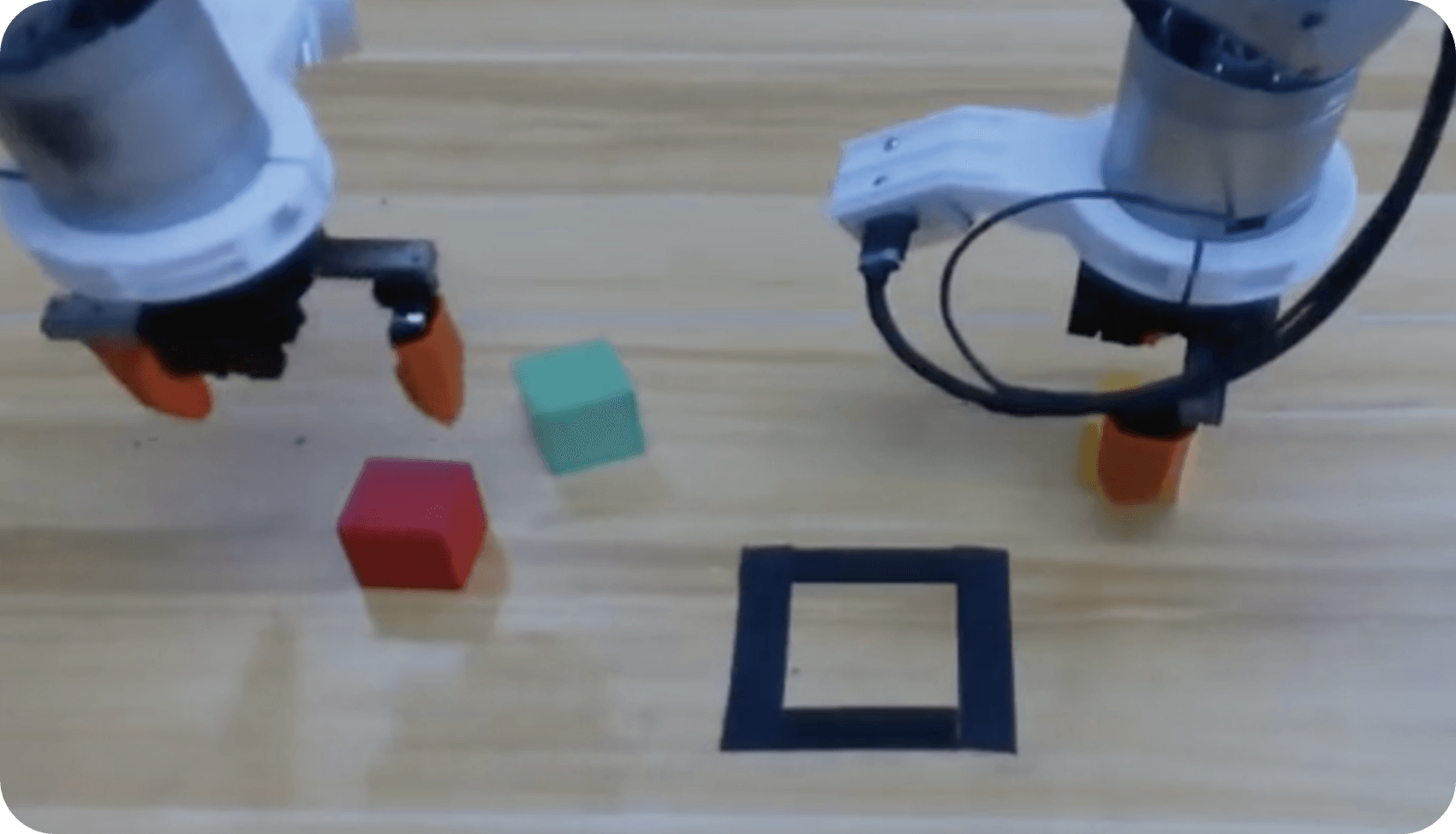
高并发架构,规模可拓展:具备支撑数百台机器人同步开展数据采集的技术能力。通过高并发架构与负载均衡调度,确保海量数据流的实时接收与处理,为构建高质量的数据集提供基础。 7*24小时在线采集,稳定可靠
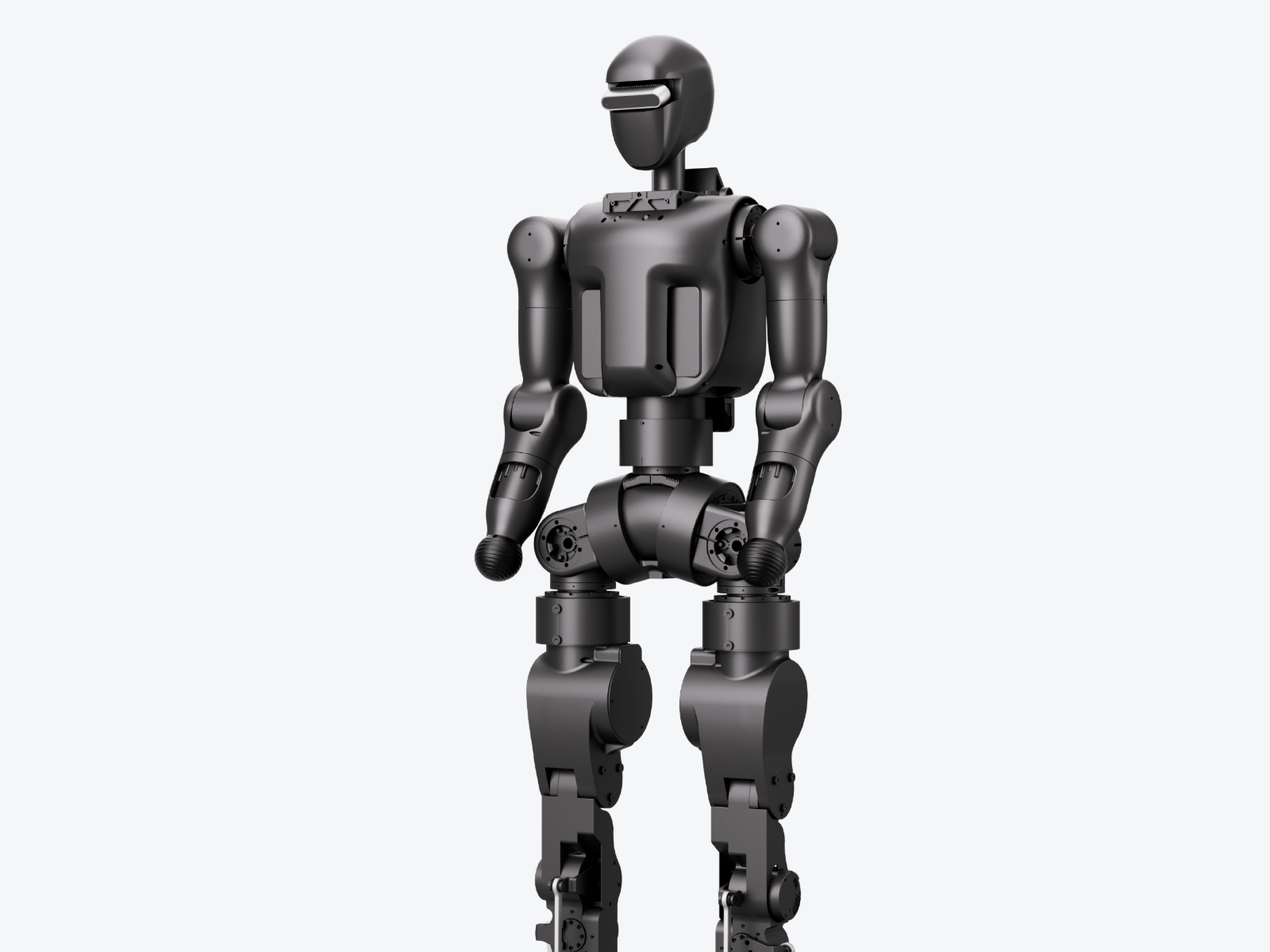
G1-D通用版:G1-D旗舰版 整机尺寸(立柱最低高度)
整机自由度(不含末端):: 19
手臂自由度:: 7×2
整机尺寸(立柱最低高度): 约1260x500x500mm
整机尺寸(立柱最高高度): 约1680x500x500mm
整机重量(含电池): 约50kg
整机自由度(不含末端): 17
单臂自由度(不含末端): 单臂最大负载【1】
单臂最大负载【1】: 约3kg
立柱升降速度: 约60mm/s
底盘移动速度: 1.5m/s
传感器: 底盘激光雷达*1 + 底盘深度摄像头*2
+ 底盘物理碰撞传感器*2: + 底盘低矮障碍物识别传感器*2
平台基于高性能分布式训练架构,可实现计算任务的弹性调度与并行加速,按负载资源动态扩展,实现90% GPU利用率。 训练及推理流程
UnifoLM-WMA-0: 跨机器人本体的开源世界模型
[1] 手臂最大负载,不同手臂伸展姿态下,差异很大
具备支撑数百台机器人同步开展数据采集的技术能力。通过高并发架构与负载均衡调度,确保海量数据流的实时接收与处理,为构建高质量的数据集提供基础。 7*24小时在线采集,稳定可靠
G1-D旗舰版 整机尺寸(立柱最低高度)
整机尺寸(立柱最低高度) 约1260x500x500mm
约1260x525x570mm 整机尺寸(立柱最高高度)
整机尺寸(立柱最高高度) 约1680x500x500mm
平台基于高性能分布式训练架构,可实现计算任务的弹性调度与并行加速,按负载资源动态扩展,实现90% GPU利用率。 训练及推理流程
Unitree G1-D 是 应用方案产品,核心信息包括整机自由度不含末端为 19、手臂自由度 7x2、支持多样化末端配置。
| 二次开发 | 有/可咨询 | 支持采集、标注、训练、仿真和部署流程 |
|---|
| 重量 | 约 35kg | |
|---|---|---|
| 宽度 | 525mm | |
| 高度 | 1260mm | 站立或组件尺寸 |
| 自由度 | 19-31 |
|---|
G1-D 旗舰版 是 Unitree G1-D 的旗舰版。
G1-D 通用版 是 Unitree G1-D 的通用版。
Unitree G1-D 宇树人形机器人 数采训练全栈解决方案 | 宇树科技
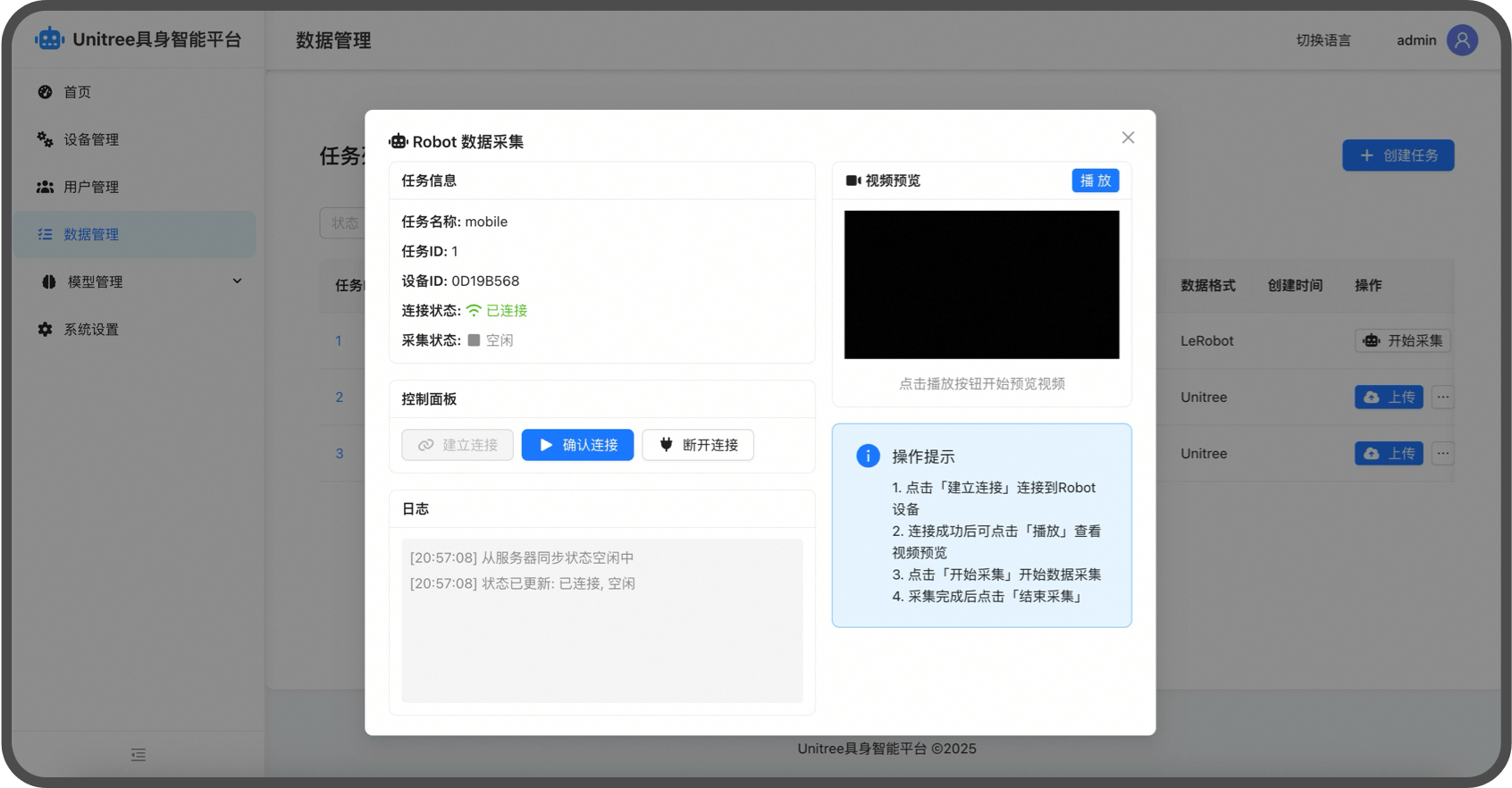
数采训练全栈解决方案
系统化的数据采集工具
集数据采集、处理、标注、审核及数据资产管理的一站式全流程数采平台
全面的模型训练及推理工具
支持主流开源模型框架
提升场景数据采集效率,降低传统采集方式的成本,
可视化模版管理采集高效





当前产品还没有匹配到可确认的资讯关联。



Booster T1 是加速进化官网面向开发者、科研团队和 RoboCup 场景展示的人形机器人开发平台。官网资料显示,T1 约 1.18m、约 30kg,支持基础版、标准版、定制版三档配置,最高可到 41 自由度,搭载 NVIDIA AGX Orin 提供 200 TOPS AI 算力,持续行走约 2 小时、持续站立约 4 小时。
Fourier N1 是傅利叶首款开源人形机器人,作为 Fourier Nexus 开源生态矩阵的首个落地项目,公开页面显示其身高 130cm、体重 38kg、全身 23 自由度、续航 2 小时以上,并开放 BOM、STEP、图纸、装配 SOP 和基础操作软件。

AlphaBot 2 是智平方在 2025 年 4 月发布的新一代通用智能机器人。官网新闻称其搭载 Alpha Brain / 全域全身 VLA(GOVLA),硬件具备 34+ 自由度、360°x360° 全空间探测感知、腰腿升降结构、0-240cm 垂直工作范围、单臂 700mm 臂展和 6h+ 连续工作能力。
可以按产品线、形态、尺寸级别、重量、自由度、续航、价格和关联硬件查看。
整机自由度不含末端为 19;手臂自由度 7x2;支持多样化末端配置