最大行走速度超过1.5M/S
机身具有良好的抵抗冲击的能力,在跑步、跳跃、与外物碰撞或者摔倒时,机身能够很好的抵抗冲击力负荷 良好的稳定性
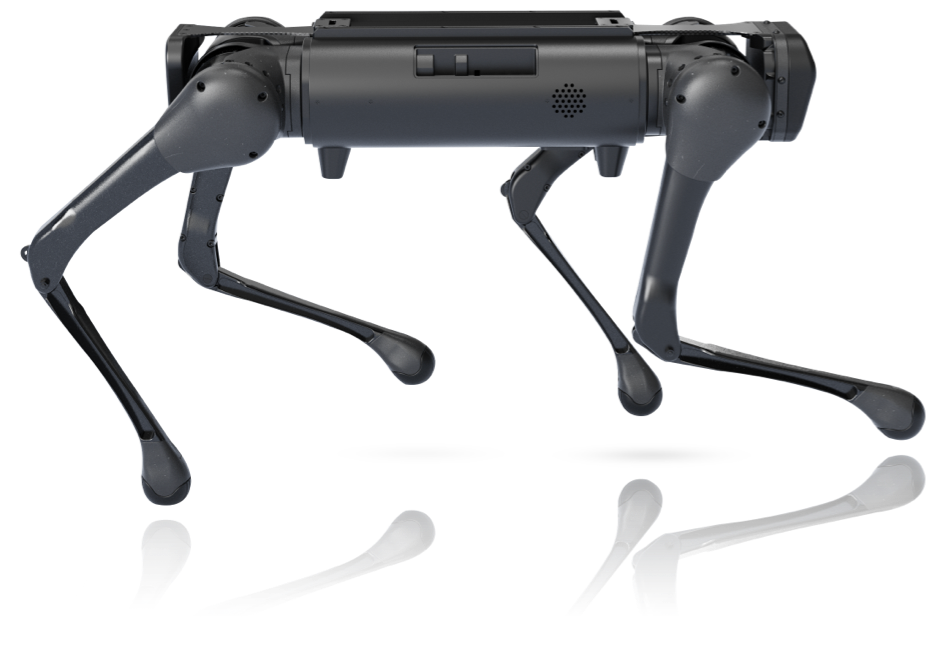
Unitree AlienGo 是 四足机器人产品,核心信息包括不带电池约 21.5kg、站立尺寸 0.65 x 0.31 x 0.6m、续航 2.5 到 4.6h。
Unitree AlienGo 的资料页已整理为产品定位、关键能力、参数、版本、影像资料、资料链接和关联内容。
最大行走速度超过1.5M/S: 机身具有良好的抵抗冲击的能力,在跑步、跳跃、与外物碰撞或者摔倒时,机身能够很好的抵抗冲击力负荷
丰富的外置接口: 开发者版本带有板载PC并开放相应接口
整机重量(不带电池): 21.5kg ±1kg
负载能力: 13kg
最大行走速度: >1.5m/s
外置接口: 以太网口x2、USB3.0x2
续航时间: 2.5-4.6h
电池容量: 12600mAh
最大行走速度超过1.5M/S:机身具有良好的抵抗冲击的能力,在跑步、跳跃、与外物碰撞或者摔倒时,机身能够很好的抵抗冲击力负荷 良好的稳定性
续航时间:2.5-4.6h 实时操作系统
感知功能:深度相机(2组)、视觉里程计相机(1组) 激光雷达:单线或多线(选配)
深度相机:x2组 全局快门和宽视野
最小感测深度约为0.11m:高达1280x720的深度分辨率 视觉里程计相机
最大行走速度超过1.5M/S: 机身具有良好的抵抗冲击的能力,在跑步、跳跃、与外物碰撞或者摔倒时,机身能够很好的抵抗冲击力负荷
丰富的外置接口: 开发者版本带有板载PC并开放相应接口
整机重量(不带电池): 21.5kg ±1kg
负载能力: 13kg
最大行走速度: >1.5m/s
外置接口: 以太网口x2、USB3.0x2
续航时间: 2.5-4.6h
电池容量: 12600mAh
整机自由度(电机数): 12
超长续航
&超大负载
最大行走速度超过1.5M/S
机身具有良好的抵抗冲击的能力,在跑步、跳跃、与外物碰撞或者摔倒时,机身能够很好的抵抗冲击力负荷 良好的稳定性
2.5-4.6h 实时操作系统
深度相机(2组)、视觉里程计相机(1组) 激光雷达:单线或多线(选配)
x2组 全局快门和宽视野
高达1280x720的深度分辨率 视觉里程计相机
>1.5m/s 高清实时图传
激光雷达:单线或多线(选配) 整机自由度(电机数)
能轻松实现快跑、后退跑、左右侧移、原地转弯、匍匐前行、侧滚翻、跳跃、越障、避障、倒地后原地爬起、上下斜坡/台阶等特殊运动形态 最大行走速度超过1.5M/S
机身具有良好的抵抗冲击的能力,在跑步、跳跃、与外物碰撞或者摔倒时,机身能够很好的抵抗冲击力负荷 良好的稳定性
Unitree AlienGo 是 四足机器人产品,核心信息包括不带电池约 21.5kg、站立尺寸 0.65 x 0.31 x 0.6m、续航 2.5 到 4.6h。
| 二次开发 | 有/可咨询 | 支持 C/C++、ROS、高层和底层控制接口 |
|---|
| 续航时间 | 约 2.5-4.6h |
|---|
| 自由度 | 12 |
|---|
| 负载 | 约 13kg |
|---|
| 重量 | 约 21.5kg | |
|---|---|---|
| 宽度 | 310mm | |
| 高度 | 600mm | 站立或组件尺寸 |
| 长度 | 650mm |
AlienGo 是 Unitree AlienGo 的行业版。
无响应急停保护、摔倒保护
可从四足机器人 - 行业级、中型四足、重量、自由度、续航和价格等维度对比。






当前产品还没有匹配到可确认的资讯关联。

Unitree A2-W 是 四足机器人产品,核心信息包括带电池约 52kg、站立尺寸 900 x 440 x 625mm、16 个关节电机。



宇树机器狗B2是奔跑速度最快的工业级四足机器人, 速度6m/s, 持续负载40kg, 持续行走续航5h, 综合性能是其他四足机器人的2~3倍! 全地形适应, 超大负载, 持久续航, 超强运动性能!了解机器狗用途和优势。

Booster K1 是加速进化官网定位的具身开发入门级平台。官网公开资料显示,K1 起售价 3.99 万元,约 95cm、约 19.5kg、22 自由度,极客版、教育版、专业版分别提供 48、117、200 TOPS AI 算力,并面向 RoboCup KidSize、教育课程和具身开发入门场景。
可以按产品线、形态、尺寸级别、重量、自由度、续航、价格和关联硬件查看。
不带电池约 21.5kg;站立尺寸 0.65 x 0.31 x 0.6m;续航 2.5 到 4.6h;负载能力 13kg