4月18日,波士顿动力新一代 Atlas 用以恐怖片的方式站起来的动作引起全网震惊,而仅仅一周后,中国人形机器人公司加速进化 BR002 机器人就完美复现了该动作。
「加速进化」公司的旋转起身视频全网被观看了超过 200 万次,许多人为之震惊,在 YouTube 上,有人甚至怀疑这并不是真实的视频,而是用 AI 做出来的,不敢相信中国企业在如此短的时间就能复现国外顶级人形机器人公司的高难度动作。

当然,这个视频是真实的。然而,当我们在惊叹「加速进化」公司的技术强悍的同时,不禁也产生一些疑问:
•在算法与构型的角度,BR002 诡异的动作是怎么实现的?
•为什么是「加速进化」这家公司首先完成复刻?它是什么背景?
于是,机器人大讲堂和加速进化公司聊了聊,独家获得了一些关键信息。
▍魔法在于构型与算法的完美协调
算法与构型的完美协调,是这两家公司能做出「诡异转身动作」的关键。
加速进化称,实现旋转起身这个动作一方面依靠加速进化采用了一个独特的关节布局,这个布局的特点是髋部三个关节运动范围都很大,甚至能 360° 旋转。
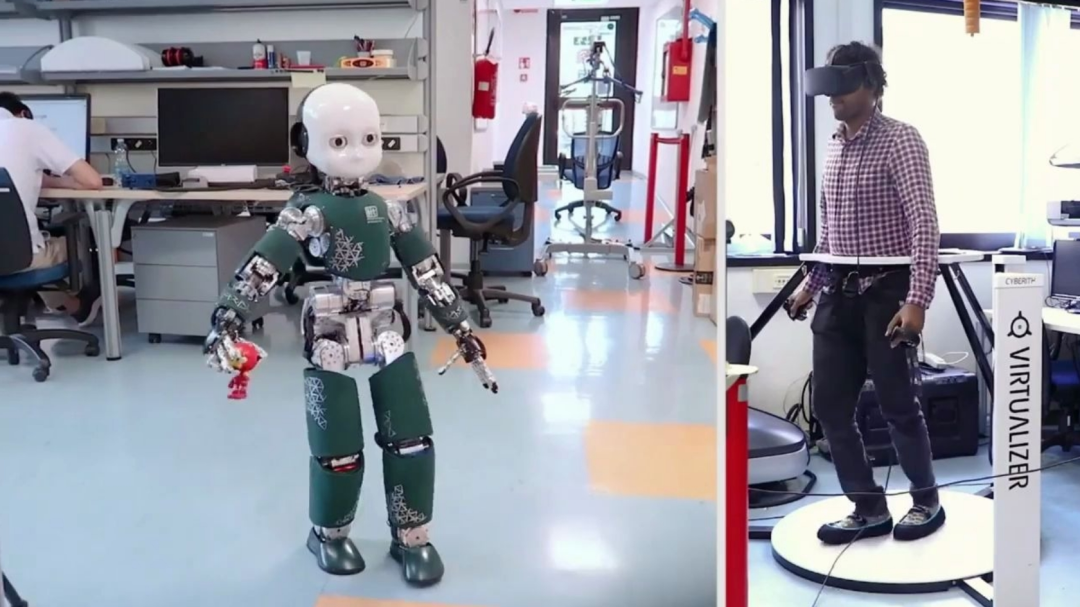
这个布局并不是波士顿动力新一代 Atlas 的首创,iCub 等机器人很早就采用了这种构型,RoboCup 人形组比赛中也有队伍采用了这种构型。
旋转起身动作除需要特殊的关节布局外,还需要很好的全身控制能力才能够实现。例如,机器人躯干和腿部都有很多质量,急速旋转时,相当于给机器人施加比较大的扰动。另外,腿反转时的特殊落脚点对步态的生成也会有影响。这也是为什么波士顿动力会选择使用这个动作作为首秀。
加速进化公司在看到新一代 Atlas 的视频后,由于腿部构型也高度相似,于是基于其独特的算法积累,仅花了两三天的时间就很快成功复现这套正常机器人乃至人类都很难实现的“诡异动作”。不过,由于该套算法的真机调试和验证时间较短,因此仍采取了高步频动态调整位姿,但这并非必须。
据了解,这套多层级算法可以很好基于感知、定位、决策、运动、步态等几个技术模块的数据范式实现快速解耦和重构,并实现轨迹动作的优化、复现,而无需频繁调参,从而能使得不懂运控的人都能非常快速地设计机器人完成各类动作。这也是加速进化仅用三天就复现该动作并在真机上跑通的原因。
▍与 Atlas 相似的构型
不同于市场上部分公司人形机器人的轻腿构型,加速进化和新一代 Atlas 这种重腿构型能将重心下移,动作更加稳定,机器人活动范围也相较更大。
据悉,这套构型目前还能进行横向劈叉、纵向劈叉等动作。而此类动作在此前的比赛和展览中,清华团队也曾有过类似展示。
但通常,业界会对关节做限位,以免线缆的缠绕,而波士顿动力突破常规思路,将一体化关节中空走线的优势特性充分发挥出来。

机器人大讲堂采访外部专家表示,从外观上猜测,新一代 Atlas 主要利用平行四连杆对边平行的机构设计,两条腿相对独立,之间并没有直接的连接物,足部踝关节由两个直线执行器并联驱动,腰部采用 S+UPR+UPS 并联结构,这保证了双腿的灵活性,同时也提高了稳定性。
从技术角度上来说,专家解释道:波士顿动力新一代 Atlas 构型和加速进化的 BR002 同样采取了类似构型,髋部弹性运动使质心下移,这能保证机构紧凑的同时,很好增大关节驱动力矩,并减小回转间隙。
如果仔细观察,新一代 Atlas 利用平行四连杆机构实现机器人大小腿的机构设计,能保证机器人在行走过程中两只脚底面始终与地面保持平行,这就能有效降低电机输出轴的回转间隙对机器人行走稳定性所造成的影响,也能展示更丰富的起身动作。

▍科班背景的「搞机」团队
在《2024 年第三季度推出新品?加速进化有无真实力?》一文中,我们介绍过,加速进化成立于 2023 年 8 月份,团队核心成员出身于清华机器人控制实验室,拥有 20 年人形机器人领域的技术积累,技术研发实力非常强。
这种顶尖高校研发团队实际“搞机”的实力到底有多强呢?我们了解到的是,BR001 于 2023 年 10 月份诞生,机器人的构型就采用了和 BR002 相同的构型(而波士顿动力于 2024 年 4 月也发布了同构型的机器人),BR002 研发于2023 年 12 月份,在 BR001 的基础上,进一步升级了主控、关节等核心零部件。
这种两个月一代产品的速度,却同时完成了产品深度测试、零部件系统整合和优化,在外观上,机器人从原先的裸露电路板到如今的工程机外观,整体架构进步非常大,部分零部件已经实现了自研和定制,团队产品整合与二次开发能力也显著提升。

BR002 的参数加速进化没有多谈,因为下一代机器人即将 Q3 亮相。但我们得知,BR002 机器人应该不到 1.2 米,低于30公斤,两腿 6 个自由度,一体化关节的瞬时输出扭矩并不大。
对于构型的独特理解以及能迅速实现相匹配的算法,这是加速进化团队非常具有核心竞争力的点。得益于此前清华期间参与机器人足球赛过程中不停更换机器人构型的经历,加速进化团队沉淀下来一套能够独特的算法并将其软件工程化,形成了能够快速实现动作轨迹复现和优化的能力,从而做到了当产品定义和形态发生变化时,可以快速跟进。
加速进化表示,未来机器人或将同样采用中空走线关节设计,以优化机器人走线。同时在软件上,还将朝着机器人系统底层进行深入研究。
通过控制结构分层的独特算法,加速进化希望未来能把控制问题推向极致,将运动控制能力做到系统级,从而以一个更强的通用性载体,提升各个模块 API 接口的兼容性,并采用云边端架构,真正实现操作系统的低时滞交互,带来人形机器人更大的场景拓展空间。
如需咨询企业合作事宜,欢迎联系堂博士(13810423387,手机与微信同号)进行对接。
----------------END----------------
工业机器人企业
埃斯顿自动化 | 埃夫特机器人 | 节卡机器人 | 珞石机器人 | 法奥机器人 | 非夕科技 | CGXi长广溪智造 | 大族机器人 | 越疆机器人 | 睿尔曼智能 | 优艾智合机器人 | 阿童木机器人 | 盈连科技
服务与特种机器人企业
亿嘉和 | 晶品特装 | 九号机器人 | 普渡机器人 | 机器姬 | 猎户星空
医疗机器人企业
元化智能 | 天智航 | 思哲睿智能医疗 | 精锋医疗 | 佗道医疗 | 真易达 | 术锐®机器人 | 罗森博特 | 磅客策 | 柏惠维康
人形机器人企业
优必选科技 | 宇树 | 达闼机器人 | 云深处 | 理工华汇 | 傅利叶智能 | 逐际动力 | 乐聚机器人 | 星动纪元 | 天链机器人
核心零部件企业
绿的谐波 | 因时机器人 | 脉塔智能 | 伟景智能 | 锐驰智光 | 地平线 | 本末科技 | NOKOV度量科技 | 青瞳视觉 | 因克斯 | 蓝点触控 | 福德机器人 | 巨蟹智能驱动 | 鑫精诚传感器
教育机器人企业
硅步机器人 | 大象机器人 | 中科深谷 | 史河科教机器人 | 大然机器人
加入社群
欢迎加入【机器人大讲堂】读者讨论群, 共同探讨机器人相关领域话题,共享前沿科技及产业动态。
教育机器人、医疗机器人、腿足机器人、工业机器人、服务机器人、特种机器人、无人机、软体机器人等专业讨论群正在招募,添加微信“robospeak2018”入群!
兼职作者&投稿
机器人大讲堂正在招募【兼职内容作者】,如果您对撰写机器人【科技类】或【产业类】文章感兴趣,可以将简历和原创作品投至邮箱:liuzk@leaderobot.com
我们对职业、所在地没有要求,欢迎朋友们的加入!

看累了吗?戳一下“在看”支持我们吧
