

联系我们
简体中文
English
日本語
Menu
文档中心

- 产品快速使用指南 上手视频合集 产品清单 产品用户手册 售后服务 产品使用指南 产品清单 上手视频合集 SDK网址 售后联系
- PowerFlow L28产品手册 PowerFlow R系列执行器产品手册 域控制器DCU产品手册 产品清单 上手视频合集 产品使用指南 SDK网址 售后联系
- 快速上手指南 产品使用手册
首页> 产业生态 > 智元AIMA开放平台 > 开源 > 产品手册 > 远征 > A3 > 产品用户手册
智元远征A3 产品用户手册
发布时间:2026-04-02 10:29:36
欢迎使用
欢迎您选择使用智元机器人出品的远征 A3 机器人。
本说明书将引导您全面了解与快速使用智元远征 A3 机器人(下文简称 “ 机器人 ” ),并详细提供有关使用和维护的重要信息,以帮助您获得最佳的产品体验。如您在使用过程中有任何问题,请拨打服务热线或联系微信官方公众号,智元技术支持专家将竭诚为您解答。 用户手册获取途径: https://www.agibot.com.cn/filepage/336.html

售后方式获取途径: https://www.agibot.com.cn/filepage/337.html

1. 前置声明
1.1 安全须知
1. 了解产品: 首次使用机器人前,请完整查阅相关说明资料,充分掌握其功能特点、操作流程及各项安全提示。
2. 使用环境要求: 请将机器人置于平坦、干燥且稳固的场地运行,避免在高温、低温、潮湿、坡度较大、落差明显、地面脆弱或振动强烈的环境中使用。
3. 日常巡检维护: 应定期对机器人进行保养和状态检查,重点关注关节、传感器、电源系统等关键部件,确保设备保持良好工作状态,防止因部件老化或损坏带来安全隐患。
4. 掌握急停操作: 使用前请提前确认并熟悉急停的触发方式,以便在突发情况下迅速停止机器人。急停触发后,机器人全身关节会失去支撑并软倒在地,因此需特别注意现场安全,急停后需要全程借助保护架进行防护。非必要情况下,请勿随意启用急停。
5. 预留作业区域: 运行机器人时,应保证周围具备充足活动范围,尽量避开过于狭小或人员、物品密集的区域,以降低碰撞、夹挤等风险。
6. 注意用电安全: 开机前请检查电缆、插头及插座是否完好无异常。如发现短路、温度异常升高等情况,应立即切断电源。
7. 避免不规范用途: 请确保机器人仅用于合规、合理的应用场景,不得投入危险、违规或法律法规禁止的用途之中。
1.2 安全准则
1. 运行前检查:
a. 在机器人开机或动作开始前,应先确认作业区域内不存在人员、杂物或其他障碍,特别是机械臂、关节及其他活动结构周边,避免发生碰撞或误伤。
b. 操作人员还需在启动前核实设备当前状态是否正常,并确认系统自检流程已顺利完成。
2. 规范操作与培训要求: 所有参与操作的人员都应事先接受必要培训,熟悉机器人的使用规范、操作方法以及异常情况处置流程,以减少因操作不当带来的安全风险。
3. 保持防护间隔: 使用过程中应与机器人运行区域保持不少于 1 米的间隔,防止因设备突然动作造成碰撞风险。机器人进行快速运动时,人员尤其不应停留在其预期运动轨迹附近。
4. 禁止运行状态下人工介入: 在机器人处于工作状态时,不得直接对其动作进行人为干预。如确需调整、检修或手动处理,必须先确保机器人已经完全停止,并处于断电状态后方可进行。
5. 负载与部件使用要求:
a. 机器人应在其额定承载范围内使用,不得进行超出设计能力的负载操作。
b. 在使用末端执行装置、抓取机构或其他功能部件时,应保证其与目标物体相适配,避免因不匹配造成额外挤压、受力异常或部件损伤。
6. 异常情况下的停机处理: 若机器人出现异常、失控或其他突发状况,应第一时间通过遥控器执行紧急停机操作,以尽快终止设备动作。
8. 远程控制注意事项:
a. 若机器人具备或正在使用远程操控功能,应尽量在可靠、安全的网络条件下进行操作,避免因网络中断、延迟或外部入侵影响控制稳定性。
b. 开展远程控制时,操作人员应配备实时监测手段,确保能够持续掌握机器人运行状态及现场环境情况,从而提升远程作业安全性。
2. A3 整机介绍
2.1 装箱清单

2.2 产品简介
远征 A3 系列产品具备 31 ~ 57 个自由度(不同型号和配置,自由度存在差异),可实现灵活运动与高精姿态控制。下文将为你详细介绍远征 A3 的具体配置与功能亮点
• 远征 A3 整体具备 31 个主动自由度(不含手),其中颈部具备 2 个自由度,单手臂具备 7 个自由度,腰部具备 3 个自由度,单腿具备 6 个自由度,配备硅胶手、硅胶拳头
• 感知系统配备 RGB 双目摄像头、 GPS 、 UWB 定位、肩部触摸传感器
• 通讯系统配备 Wi-Fi 、 4G/5G 移动网络
• 交互系统配备全向拾音麦克风、扬声器、曲面屏以及全向指示灯
• 能源动力系统配备 1152Wh 的电池,综合续航 10H ,支持站立工作续航 6 小时,连续行走续航 4 小时以上;支持直充与换电模式,充电时间小于等于 2h
2.2.1 部件名称及说明

序号 | 名称 | 序号 | 名称 | 序号 | 名称
1 | 头部显示屏 | 7 | 小臂 | 13 | 维修仓
2 | 左右扬声器 | 8 | 手 | 14 | 腰
3 | 交互双目相机 | 9 | 大腿 | 15 | 足
4 | 开关 | 10 | 小腿 | 16 | 充电口
5 | 麦克风 | 11 | 双肩触摸传感器 | 17 | 腰部把手
6 | 大臂 | 12 | 双电池仓
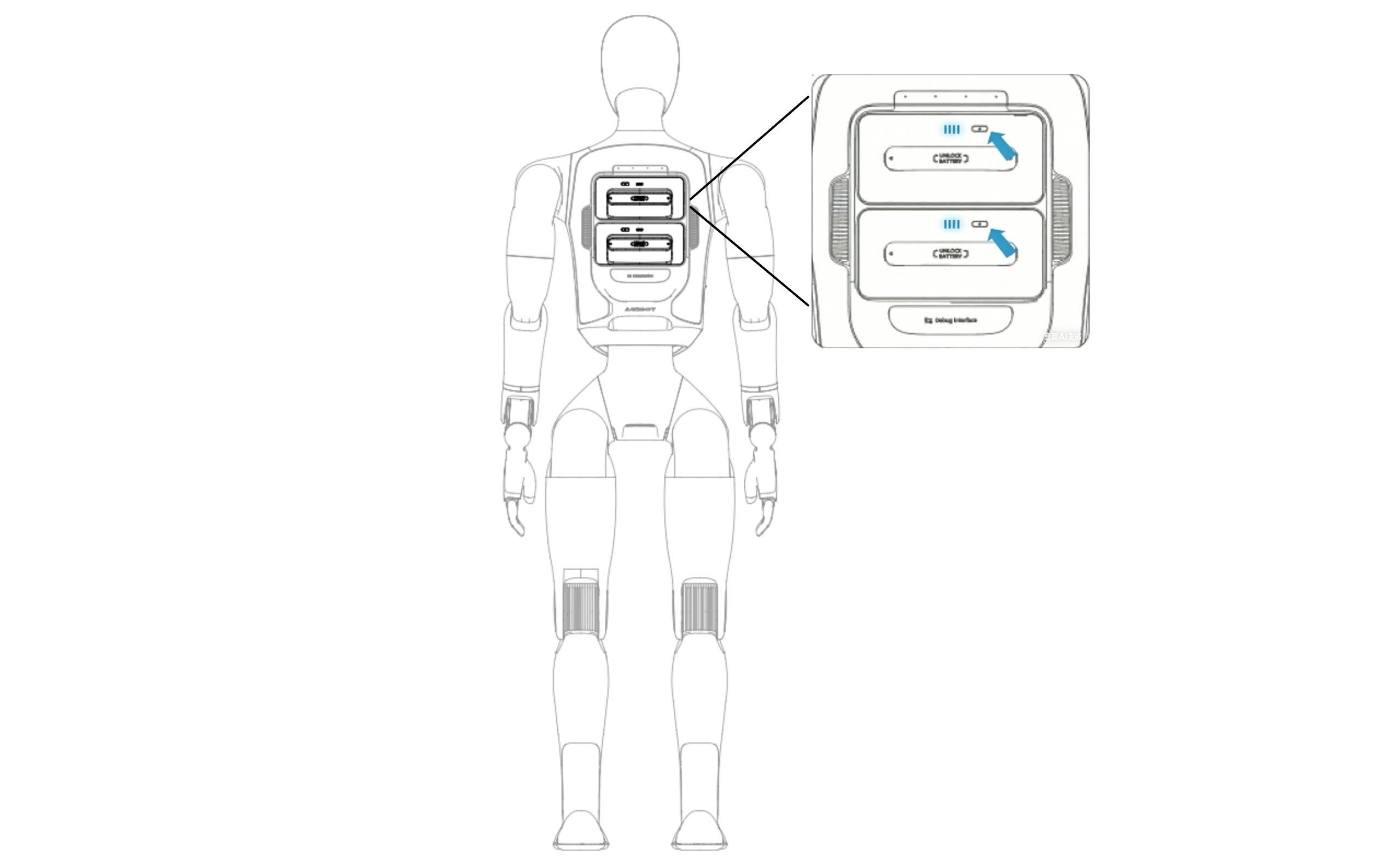
2.2.2 电池指示灯
注意:使用电池供电时,请密切关注电量状态。当电池电量不足或即将耗尽时,机器人可能会因输出功率不足立即倒地;当电量仅剩一格时,请及时充电或更换电池,确保设备稳定运行,避免因机器人摔倒引发人员安全风险。
2.2.2.1 电池指示灯位置
2.2.2.2 指示灯状态说明(放电状态下)
电池灯状态(放电状态下) | 电量说明 | 状态说明
LED全熄灭 | 0% | 完全没有电
LED1常亮,LED2~4熄灭 | 1%≤电池电量<25% | 电量不足,需要尽快充电
LED1~2常亮,LED3~4熄灭 | 25%≤电池电量<50% | 电量偏低
LED1~3常亮,LED4熄灭 | 50%≤电池电量<75% | 电量充足
LED1~4常亮 | 75%≤电池电量<100% | 满电状态
2.2.2.3 指示灯状态说明(充电状态下)
电池灯状态(充电状态下) | 电量说明 | 状态说明
LED1呼吸,LED2~4熄灭 | 电池电量<25% | 电量不足
LED1常亮,LED2呼吸,LED3~4常灭 | 25%≤电池电量<50% | 电量偏低,不建议断电使用
LED1~2常亮,LED3呼吸,LED4熄灭 | 50%≤电池电量<75% | 电量中等,可正常使用,建议继续充电至满电
LED1~3常亮,LED4呼吸 | 75%≤电池电量<100% | 电量充足,可正常使用
LED1-4常亮 | 电池电量=100% | 充电完成,可断开电源
2.2.3 用户调试接口
序号 | 硬件拓展接口 | 接口简称 | 接口说明
1 | 维护仓:调试及二次开发使用*腰部 | USB Type-A 2.0 | • 支持躯干MDU(RK3588)调试
2 | 维护仓:调试及二次开发使用*头部 | USB Type-C | • 支持头部HDU(RK3588s)调试及二次开发• 支持连接麦克风接收器
3 | 电源接口 | USB Type-C | • 支持5V/3A输出,可给遥控器等外部设备充电
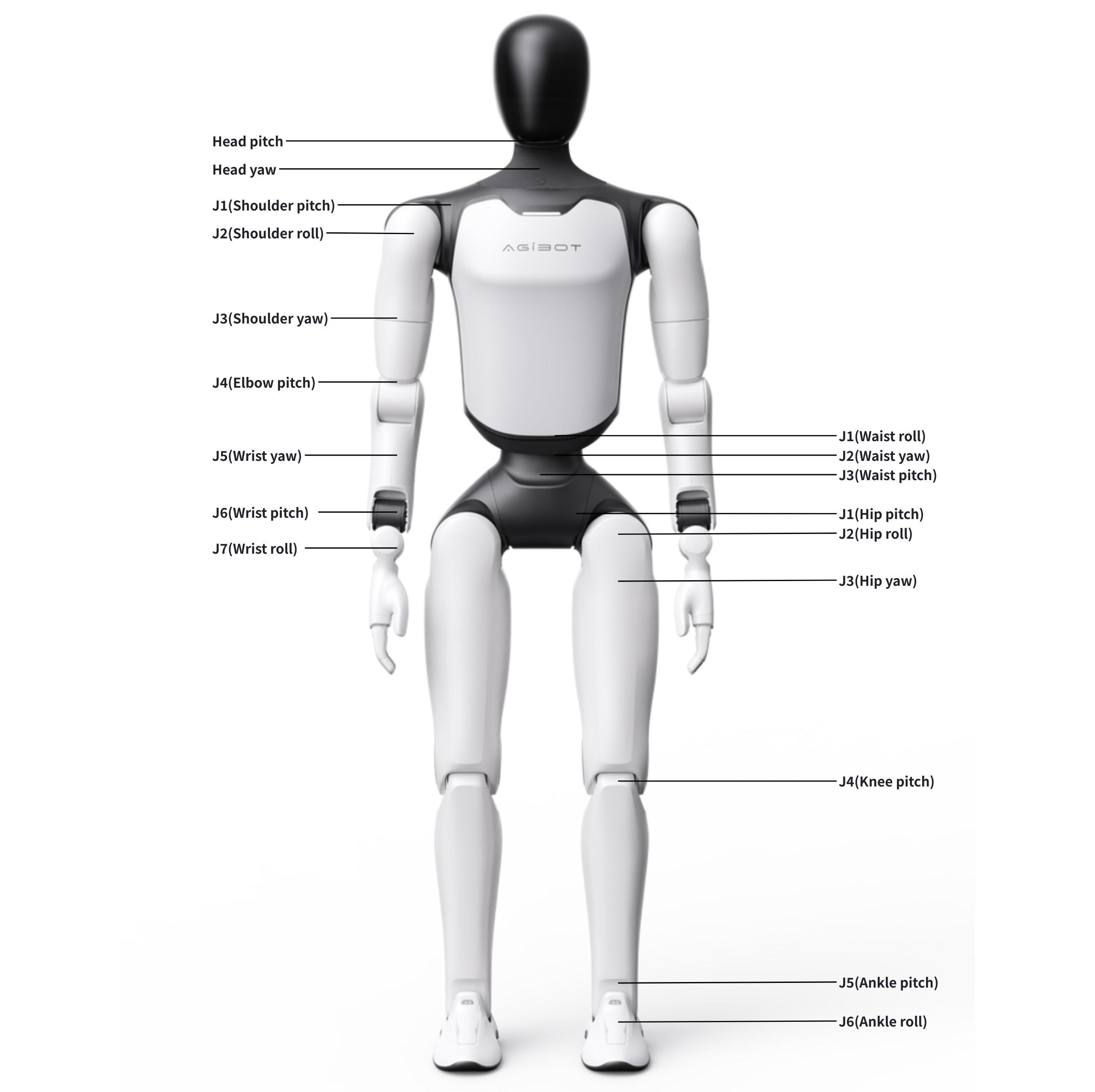
2.3 机器人关节运动空间
关节名称 | 关节限位情况 | 关节名称 | 关节限位情况
手臂 | J1(Shoulder pitch): -170°~170° | 腰部 | J1(Waist roll):±20°
J2(Shoulder roll): -91°~91°:J2(Waist yaw): ±150°
J3(Shoulder yaw): ±160°:J3(Waist pitch): ±30°
J4(Elbow pitch):-60°~140° | 腿部 | J1(Hip pitch): -168°~154°
J5(Wrist yaw): ±160°:J2(Hip roll): -60~100°
J6(Wrist pitch): ±93°:J3(Hip yaw): ±158°
J7(Wrist roll): ±33°:J4(Knee pitch): -10°~148°
头部 | 俯仰关节(Head pitch): 15°(俯)、25°(仰) | J5(Ankle pitch): -52°~30°
旋转关节(Head yaw): ±90°:J6(Ankle roll): ±20°
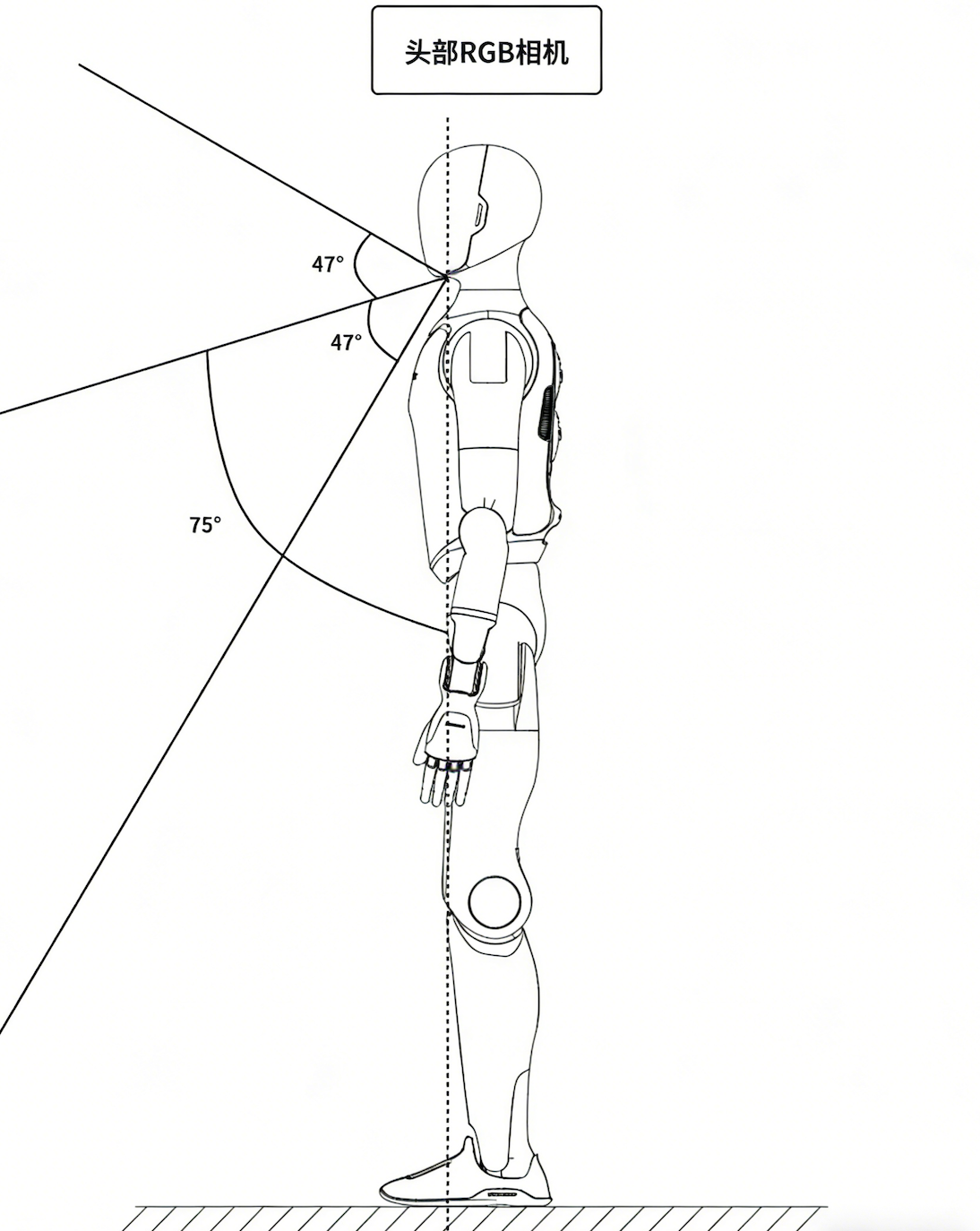
2.4 机器人传感器视场角
机器人型号 | 感知配置 | 感知能力
远征A3 | 交互双目相机 | 交互双目相机:支持人机交互场景下的视觉识别与响应
2.5 机器人规格参数
机器人型号:远征A3
整机 | 身高 | 1.73m
尺寸:173cm(H)52cm(W)30cm(L)
重量:55KG
主动自由度:51
颈部自由度:2
单手臂自由度:7
腰部自由度:3
单腿自由度:6
灵巧手自由度:10(可选,最高支持10自由度)
感知系统 | 3D激光雷达 | /
具身操作RGB-D相机:/
地形感知RGB-D相机:/
交互RGB相机:RGB双目摄像头
环视RGB相机:/
GPS:具备
GPS RTK:/
UWB定位:具备
肩部触摸传感器:具备
通讯 | 通讯方式 | WiFi、4G/5G网络、蓝牙
交互 | 麦克风 | 全向拾音麦克风
*前后阵列8*麦克风
扬声器:具备
交互屏:曲面屏
指示灯:全向指示灯
性能 | 膝关节峰值扭矩 | 320N·m
移动速度:日常行走最大速度:1.8m/s
日常行走速度<1.2m/s
实验室最大速度:2.5m/s
跑步最高5m/s
单臂负载:5kg
能源与动力 | 电池容量 | 1152W·h
续航时间:10h
※实际续航视使用情况而定、会受行走速度及负载影响,站立 / 行走时长 1:1
充能方式:支持直充与换电
充电时间:小于等于2h
充电输入电压:110V-220V
算力 | 基础算力板 | RK3588*2
高阶算力板:/
其他 | 手持无线终端 | 具备
智能OTA升级:具备
二次开发:支持
3. 遥控器介绍
3.1 遥控器整体外观

3.2 遥控器键位设置

序号 | 名称 | 序号 | 名称
1 | 左扳机(L2) | 8 | 左摇杆(L3)
2 | 左肩键(L1) | 9 | 返回
3 | 电源键 | 10 | 主页
4 | 声音 | 11 | A/B/BX/Y
5 | 右扳机(R2) | 12 | 右摇杆(R3)
6 | 右肩键(R1) | 13 | 开始
7 | 十字键 | 14 | 选择
3.3 充电说明
充电方式: 手柄支持用 c 口数据线充电,但请勿使用过大功率充电器充电,防止手柄性能下降
续航时长 :手柄一般可续航 4 小时左右,充满需要 3-4 小时,实际续航时间受多种因素影响,具体续航时间以实际使用情况为准
注意事项:1.在使用手柄操控机器人时,请密切注意机器人电量,电量不足会导致无法切换运控模式,进而导致机器人的意外摔倒2.请选择符合安全标准的充电插头为手柄充电,建议使用5V/1A或者5V/2A的充电器进行充电,防止过度充电导致手柄损坏
4. 使用说明
4.1 AimMaster
4.1.1 通用引导(如何连接机器人)
Step 1 : 语言选择(首次连接需要)

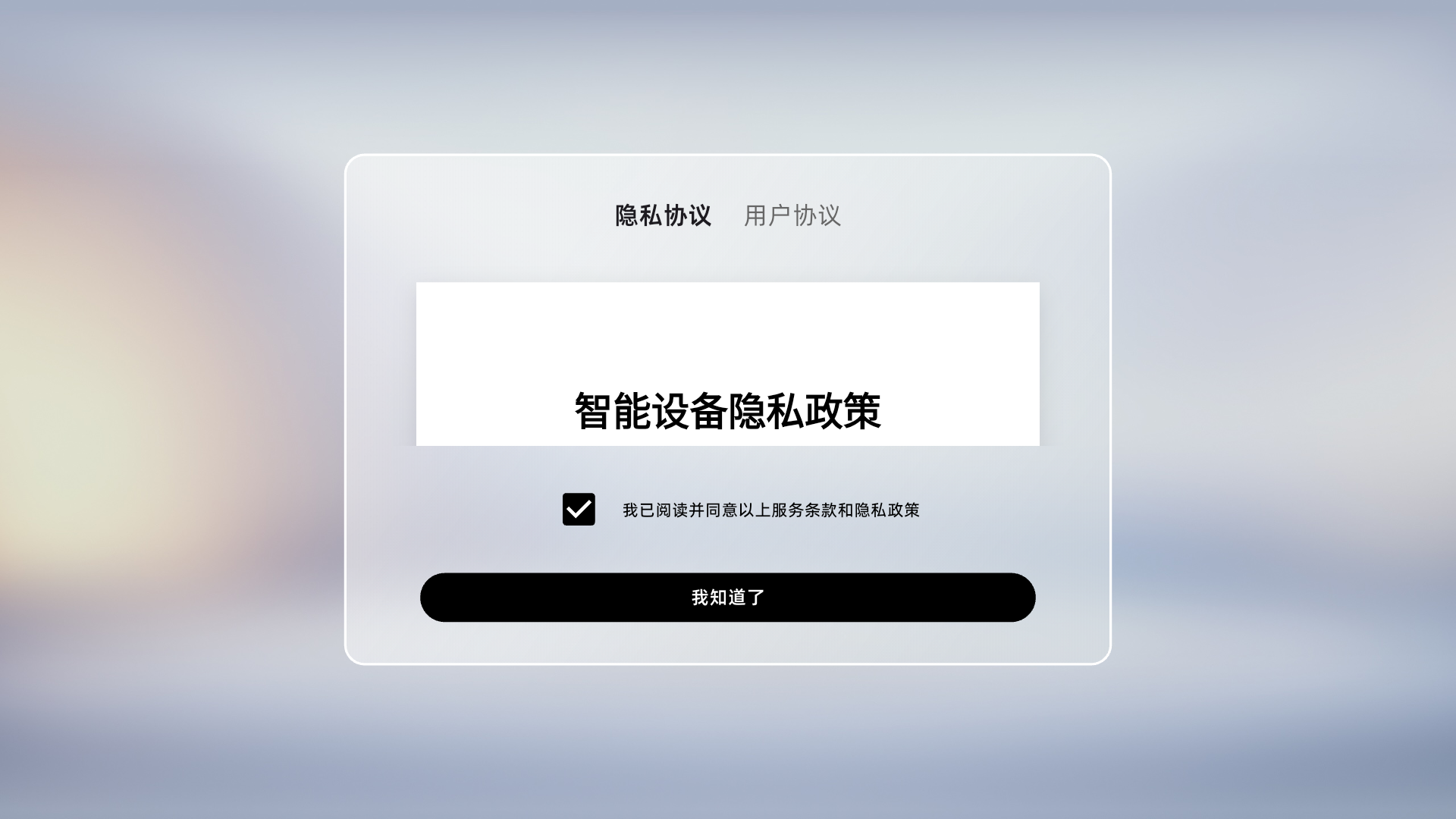
Step 2 : 隐私 & 用户协议(首次连接需要)
Step 3 : 锁屏密码设置(首次连接需要)
Step 4 : 选择机器人类型

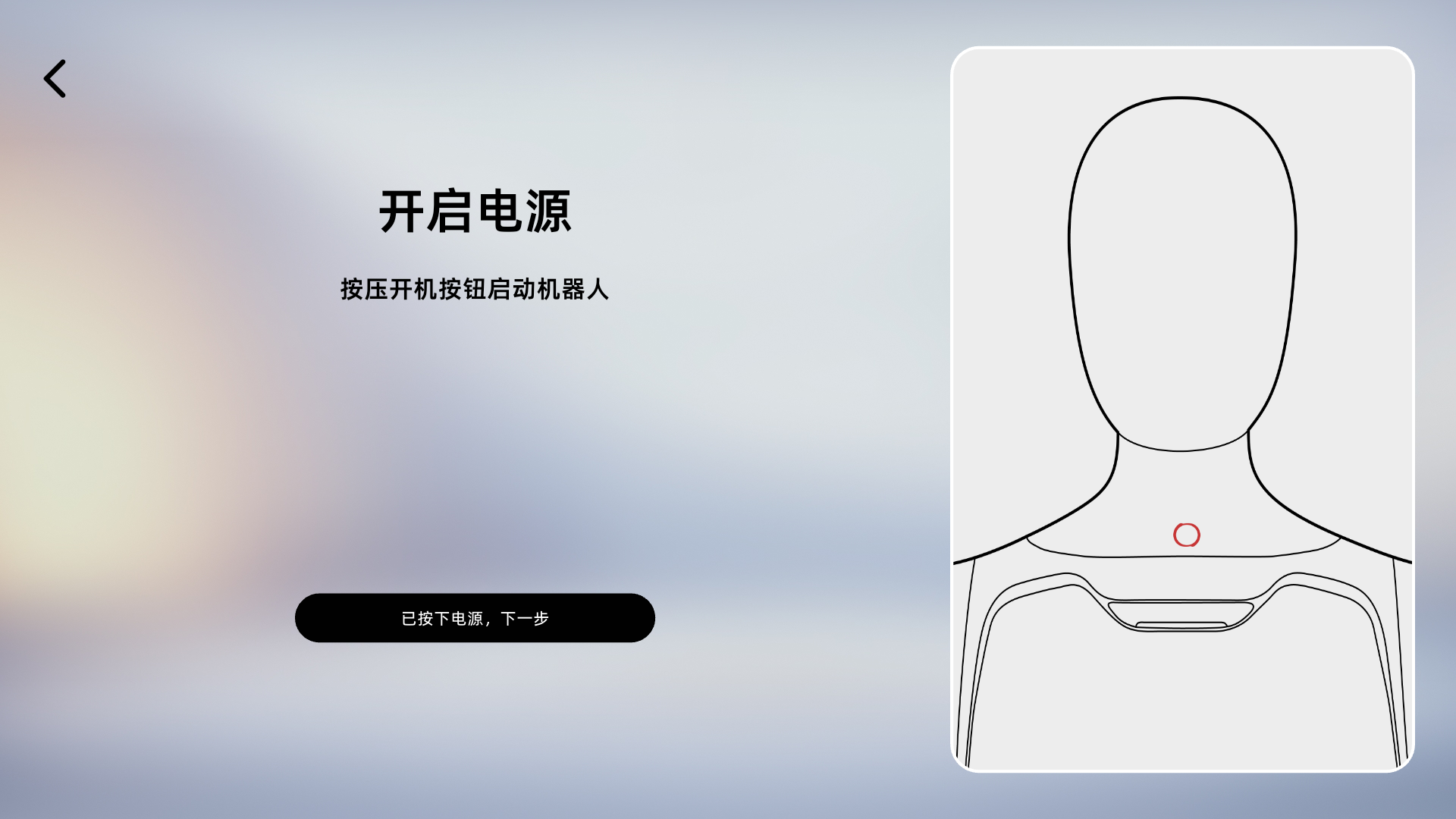
Step 5 : 开启电源
Step 6 : 网络连接(首次连接需要)

Step 7 : 选择机器人的语言及所在地(首次连接需要)

Step 8 : 机器人授权密码(首次连接需要)