

联系我们
简体中文
English
日本語
Menu
文档中心

- 产品快速使用指南 上手视频合集 产品清单 产品用户手册 售后服务 产品使用指南 产品清单 上手视频合集 SDK网址 售后联系
- PowerFlow L28产品手册 PowerFlow R系列执行器产品手册 域控制器DCU产品手册 产品清单 上手视频合集 产品使用指南 SDK网址 售后联系
- 快速上手指南 产品使用手册
首页> 产业生态 > 智元AIMA开放平台 > 开源 > 产品手册 > 灵犀 > X1
智元 PowerFlow L28产品手册
发布时间:2025-01-14 15:27:03
1. 安全须知
· 了解产品 :在使用该产品之前,请仔细阅读产品手册,了解产品的功能、操作方式以及安全注意事项。
· 遵循使用要求 :确保机器在适宜环境中进行使用,避免过高或过低的温度、潮湿环境等。
· 电源安全: 操作前确保所有电缆、插头、插座完好无损。遇到异常情况(如短路、过热等)时立即断开电源。
· 定期检查: 定期进行维护和检查,确保机器的组件如电机、电源等正常运行,避免因老化或损坏导致的危险。
· 防止误用: 确保机器不会用于任何不当、危险或法律禁止的场景。
2. 产品简介
2.1 产品概述
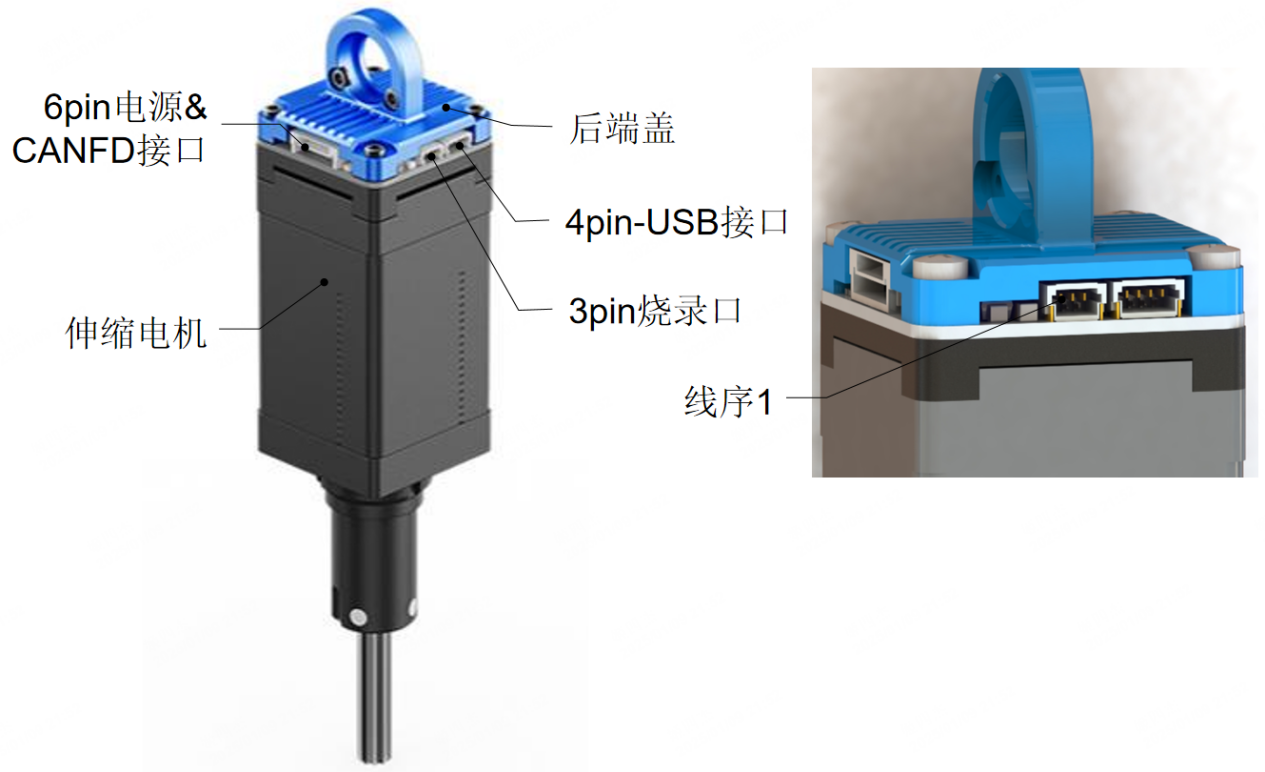
智元灵犀X1 L28是一款高速度、大推力的通用推杆。采用高密度推力电机及高度集成驱动板,通过CANFD协议或4pin-USB控制,实现收缩/伸出功能,整机重量只有200g左右。
L28除了适合用于机器人之外,还适用于各种工业、服务领域。无论是用于设备的关键零部件,还是直接用于客户端,都有很好的效果。
2.2 主要特性
- 低成本线性关节
- CANFD接口
- 高推力密度
- 高集成度一体驱动
2.3 产品参数
参数:典型值
重量:0.21kg
最大推力:110N
最大速度:50mm/s
最大行程:24mm
额定工作电压:24V DC
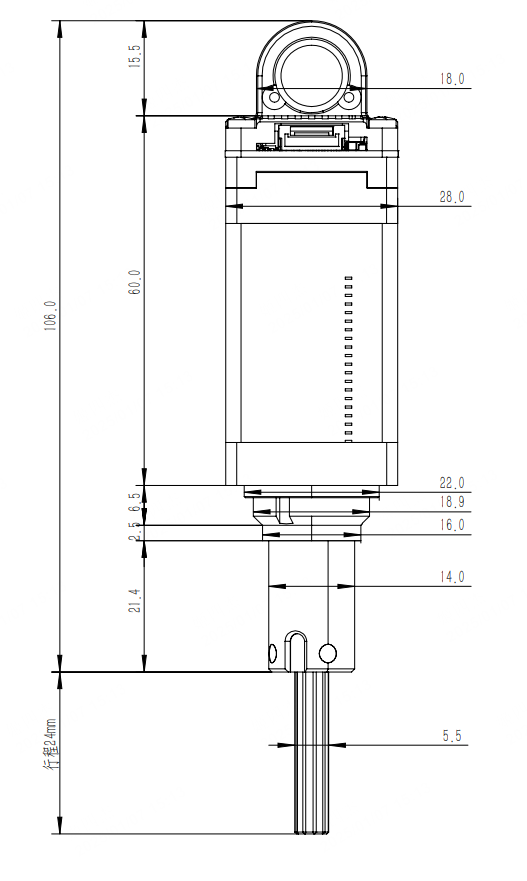
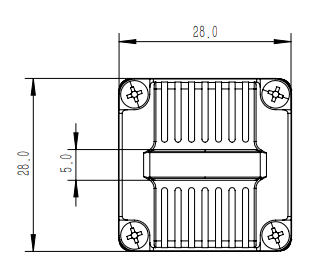
3. 产品尺寸信息
4. 电气接口互联
6PIN电源CAN通讯引脚定义:
序号 | PIN定义 | 功能描述
1 | DC-BUS | 总电源输入 24V
2:DC-BUS
3 | CAN_H | CAN总线-高
4 | CAN_L | CAN总线-低
5 | PGND | 总电源地
6:PGND
3PIN烧录口引脚定义:
1 | GND | 电源地
2 | SWCLK | 烧录时钟线
3 | SWDIO | 烧录数据线
5. 上位机调试说明
5.1 使用方法
准备一台Windows系统的电脑,并下载上位机软件 REF-CLI v1.0.3.exe 。
确保L28的行程中没有障碍物后,将L28上电。若一切正常,L28会自动收缩以寻找零位,若未能收缩则需停止使用,检查L28运动是否流畅。
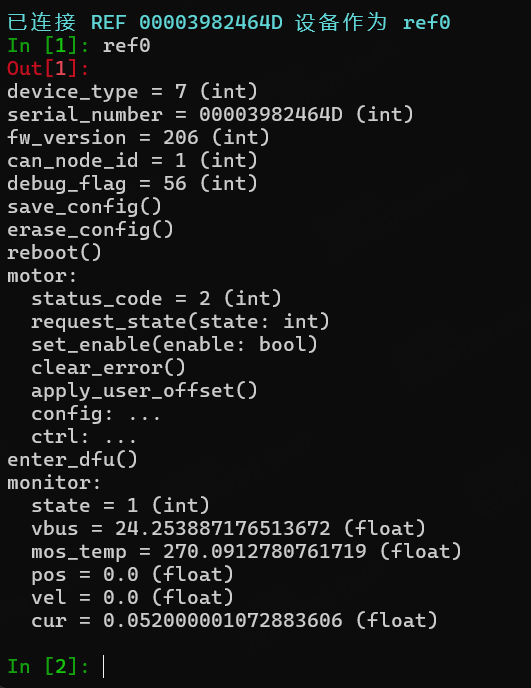
用 USB-4pin数据线将L28连接至电脑,并打开上位机软件。等待上位机识别成功后,会有如下显示:
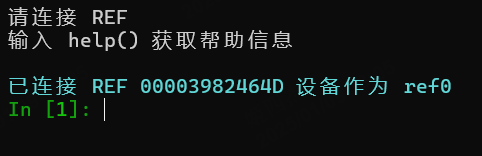
此时,编号为 00003982464D 的设备在上位机中的索引名为 ref0 。
在上位机中直接键入 ref0 并敲击回车,会显示当前L28的基本信息。根据下图所示,当前L28的固件版本为 206,CAN总线ID为1。
5.2 更改CAN-ID
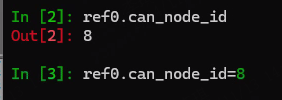
ref0.can_node_id 代表CAN总线的节点ID。可以直接查看其数值,也可以使用 = 进行赋值。执行以下命令。
ref0.can_node_id=8 // CAN ID设置为8
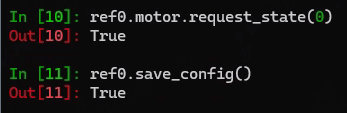
所有的参数变更,都需要调用 save_config() 方法进行保存,而该操作需要在 失能 状态下进行。
ref0.motor.request_state(0) // 先将L28失能, 0代表失能,1代表使能 ref0.save_config() // 保存所有参数
注:所有参数变更,都在保存并重新上电后生效。
5.3 控制L28运动
1. L28重新上电。(默认上电自使能)
2. 等待L28自动收缩至零点。
3. 连接上位机,并调用 set_pos(x) 方法设置其位置,其中x为伸出值,范围 0.0 - 9.5(对应至零点的距离为0 - 24mm,且为线性关系),0为全部收缩(即0mm),9.5为全部伸出(即24mm)。
ref0.motor.ctrl.set_pos(0) // 将L28运动至零点处。 ref0.motor.ctrl.set_pos(1) // 将L28运动至2.53mm处。 ref0.motor.ctrl.set_pos(5) // 将L28运动至12.63mm处。 ref0.motor.ctrl.set_pos(9.5) // 将L28运动至24mm处。
6. 通信接口及协议
PowerFlow系列执行器支持 CANFD 通信方式,仲裁域波特率 1M,采样点80%,数据域波特率5M,采样点75%。
L28在正常情况下,上电会自动使能并寻找零位,需要无须手动使能。
6.1 P2P模式
P2P模式下,上下行的报文ID相同,都是L28的节点ID,该参数可以在上位机中进行配置。
报文上下行的格式是一样的,下行报文解析后会按照同样的格式返回一帧状态数据,定义如下:
MSG ID | DLC | D0 | D1 | D2 | D3 | D4 | D5 | D6 | D7
can_node_id | 8 | pos cmd/state - raw float | cur cmd/state - raw float
•cur cmd/state :电流数据,小端格式,float类型,单位为 安培,范围 0 ~ 2.5A
•pos cmd/state :位置数据,小端格式,float 类型,数值范围 0 ~ 10.0,与实际伸缩距离的对应关系如下:
推杆伸出长度(mm) = 2.54 * pos
6.2 广播模式
广播模式下,报文ID固定为0,数据域长度为64,具体定义如下:
MSG ID | DLC | D0 - D7 | D8 - D15 | D16 - D23 | D24 - D31 | D32 - D39 | D40 - D47 | D48 - D55 | D56 - D63
0 | 64 | id 1 | id 2 | id 3 | id 4 | id 5 | id 6 | id 7 | id 8
每个节点根据其ID选用数据域中的8个字节,例如 ID为2的执行器取用的数据段为 D8 - D15,解析方法与 P2P模式 相同。
注:由于数据长度有限,该模式下每条总线最多串联8个节点,ID设置的范围为 1 - 8 。
7. 其他
本手册基于 PowerFlow L28 硬件 Ver1.1,软件 Ver2.0.6 编写。
其他产品手册中未注明事项,请查阅智元官网,或联系智元服务人员获取信息。
本页导读
- — 2.1 产品概述
- — 2.2 主要特性
- — 2.3 产品参数
- — 5.1 使用方法
- — 5.2 更改CAN-ID
- — 5.3 控制L28运动
- — 6.1 P2P模式
- — 6.2 广播模式